Dynamixel dx-116 – Robotis DX-116 User Manual
Page 31
30
English Translation by: Tribotix Pty Ltd
www.tribotix.com
DYNAMIXEL
DX-116
TXD_SHIFT_REGISTER_EMPTY_BIT.
An example program to send an Instruction packet:-
LINE 1
PORT_485_DIRECTION = TX_DIRECTION;
LINE 2
TxDByte(0xff);
LINE 3
TxDByte(0xff);
LINE 4
TxDByte(bID);
LINE 5
TxDByte(bLength);
LINE 6
TxDByte(bInstruction);
LINE 7
TxDByte(Parameter0); TxDByte(Parameter1); …
LINE 8
DisableInterrupt(); // interrupt should be disabled
LINE 9
TxDByte(Checksum); //last TxD
LINE 10
while(!TXD_SHIFT_REGISTER_EMPTY_BIT); //Wait till last data bit has been
sent
LINE 11
PORT_485_DIRECTION = RX_DIRECTION; //485 direction changed to RXD
LINE 12
EnableInterrupt(); // enable interrupt again
Please note the important lines (LINE 8 to LINE12).
Line 8 is necessary since an interrupt here may cause a delay longer than the
return delay time and corruption to the front of the status packet may occur
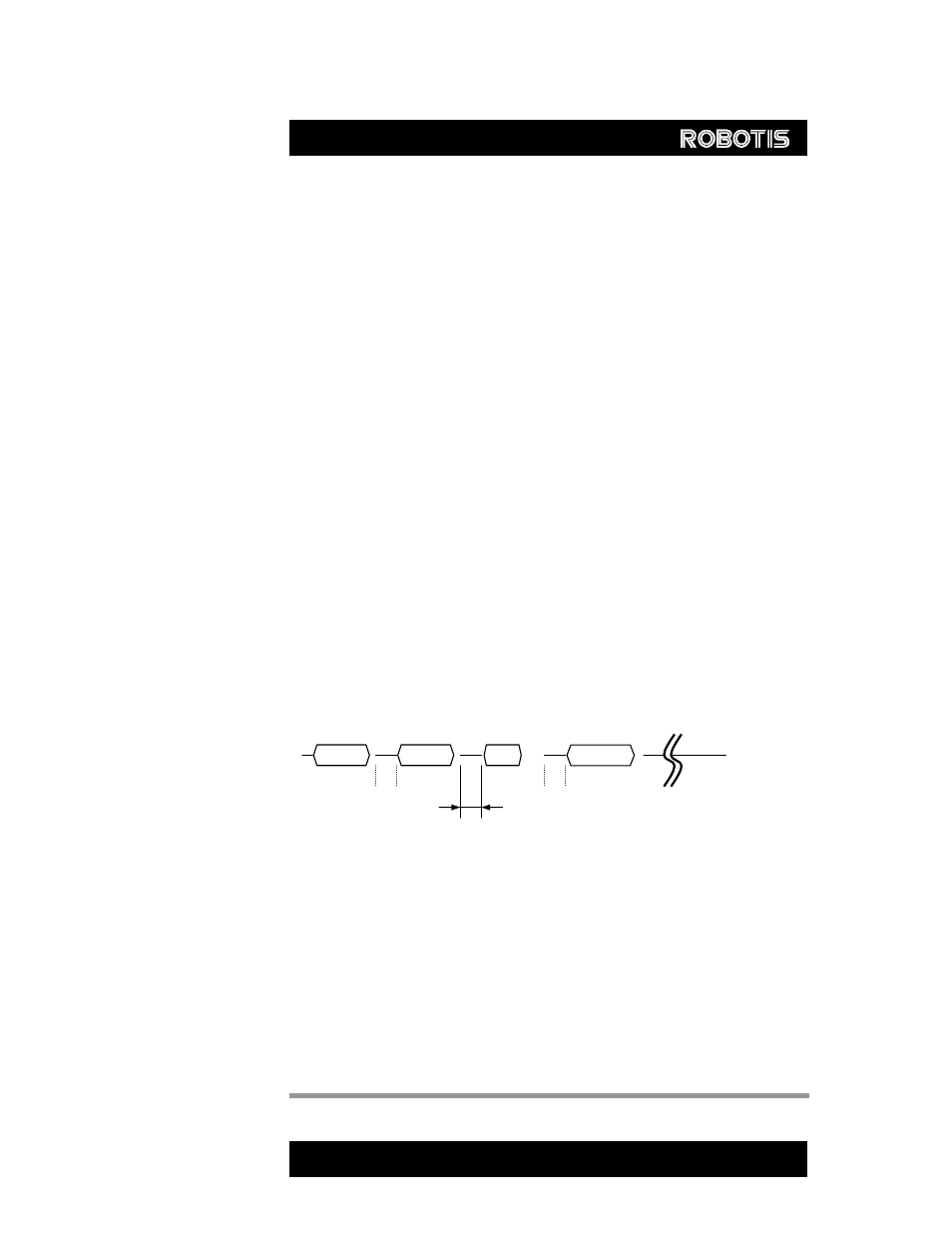
Byte to Byte Time
The delay time between bytes when sending the instruction packet. If the delay
time is over 100ms, then recognise it as a communication problem and wait for
header(0xff 0xff) of the packet again.
0xFF
0xFF
ID
Length
Byte To Byte Time