Dynamixel dx-116 – Robotis DX-116 User Manual
Page 18
17
English Translation by: Tribotix Pty Ltd
www.tribotix.com
DYNAMIXEL
DX-116
Address 0x20,0x21
Moving Speed. The angular speed to move to the Goal Position. If set to the
maximum values of 0x3ff, it moves at 70RPM.
Address 0x24,0x25
Present Position. Current position of the Dynamixel.
Address 0x26,0x27
Present Speed. Current Speed of the Dynamixel.
Address 0x28,0x29
Present Load. Load size on the Dynamixel in action. Bit 10 is the direction of the
load.
Load Direction = 0 : CCW Load, Load Direction = 1: CW Load
Address 0x2A
Present Voltage. The voltage applied to the Dynamixel. The value is 10 times the
actual voltage. For example, 10V is read as 100(0x64).
Address 0x2B
Present Temperature. Current internal Dynamixel temperature (Degrees Celsius).
Address 0x2C
Registered Instruction. Set to 1 when a REG_WRITE instruction is made. After an
Action instruction and an action it is reset to 0.
Address 0x2E
Moving. Set to 1 when the Dynamixel moves by its own power.
BIT
15~11
10
9
8
7
6
5
4
3
2
1
0
Value
0
Load Direction
Load Value
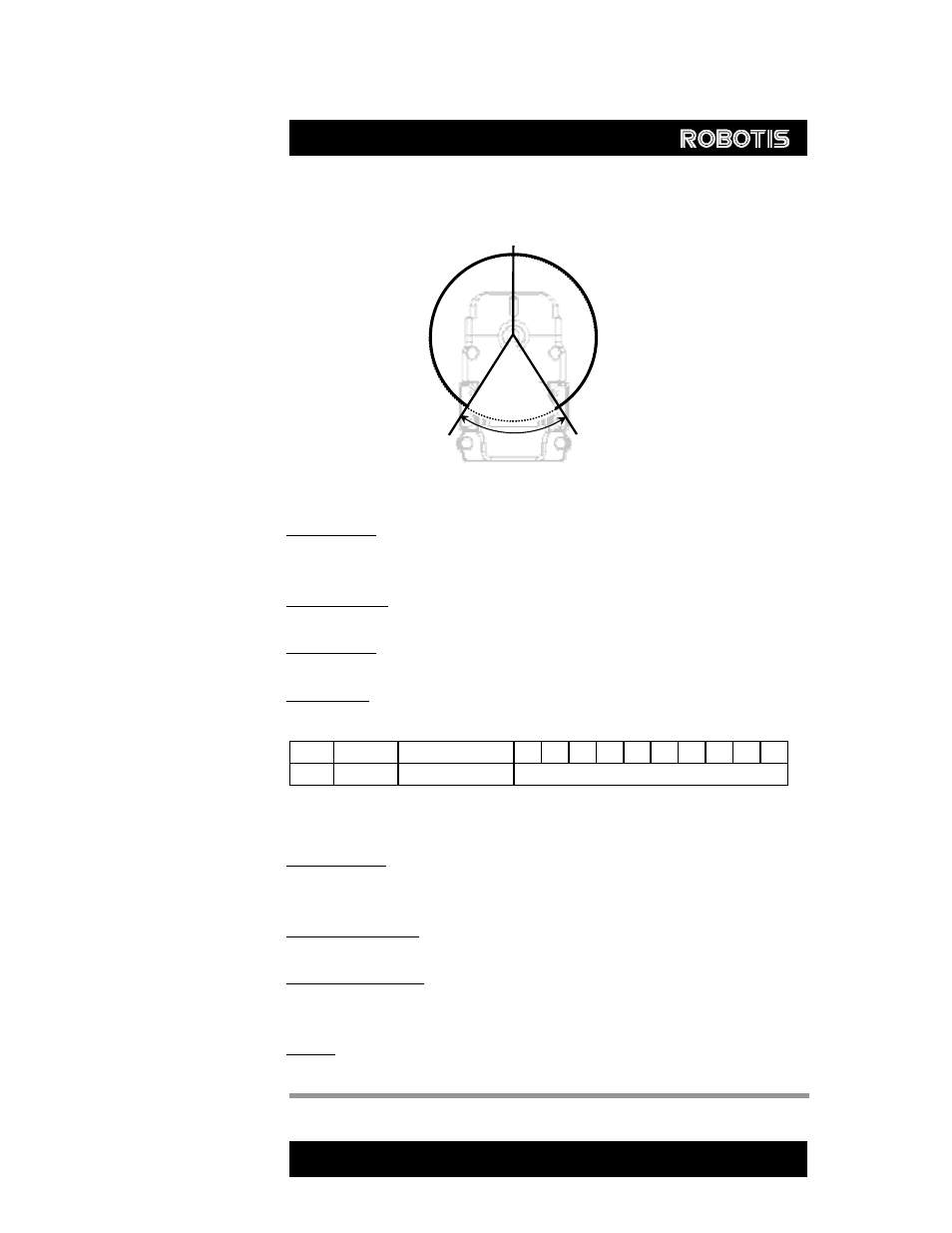
0°
(Goal Position = 0)
300°
(Goal Position = 0x3ff)
150°
(Goal Position = 0x1ff)
330~360°
Invalid Angle