Dynamixel dx-116 – Robotis DX-116 User Manual
Page 27
26
English Translation by: Tribotix Pty Ltd
www.tribotix.com
DYNAMIXEL
DX-116
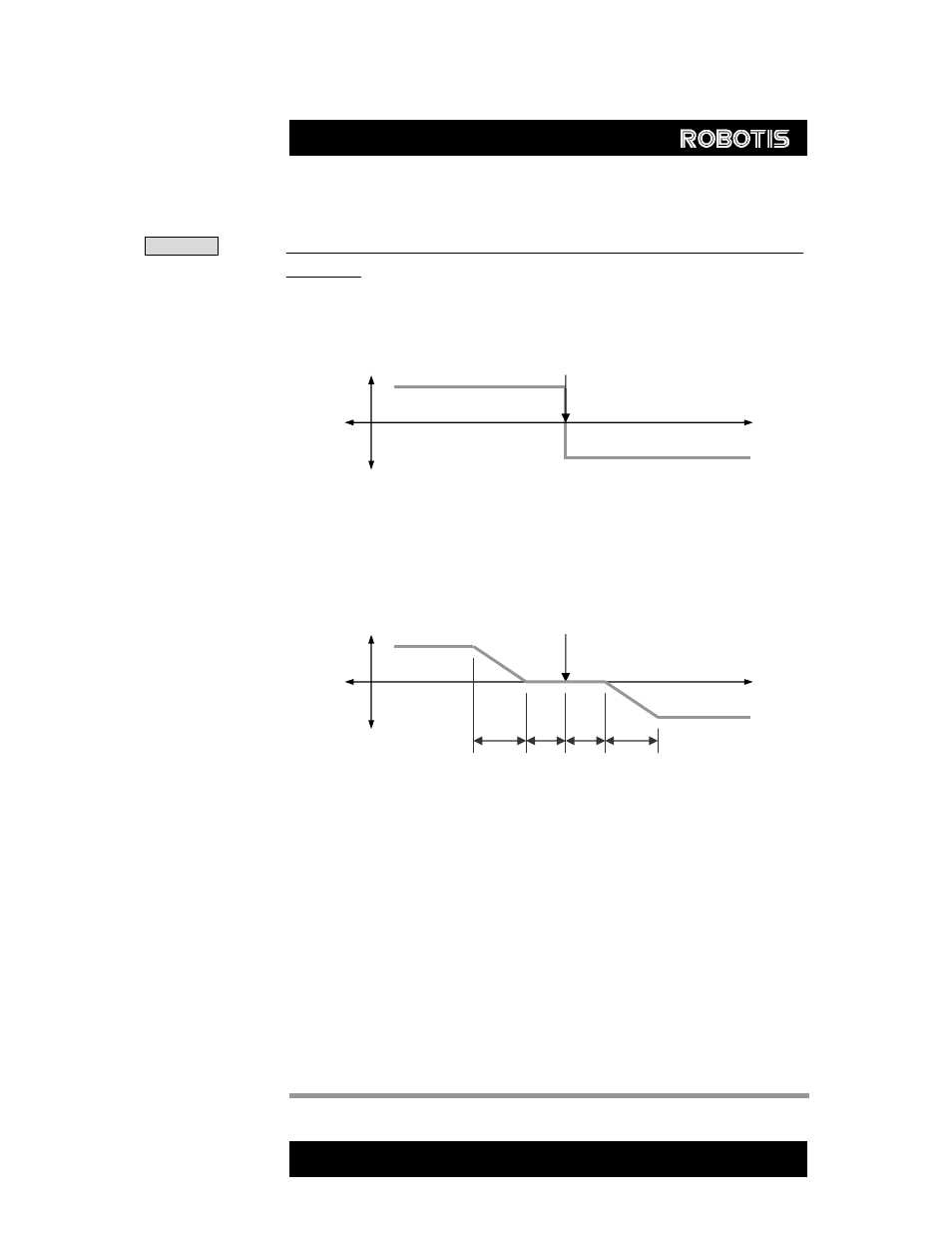
Example 16
Set the Dynamixel with ID=0 to have a Compliance Margin = 1 and Compliance
Slope=0x40
The following graph shows the Angle Error and Torque Output.
If the position is slightly deviated from the goal position, the motor will generate
a high torque to try to adjust its position to that of the goal position. The true
control method is different due to the inertia. The condition provided in the
above example can be shown in the graph below:-
A : CCW Compliance Slope(Address0x1D) = 0x40(Approximately 18.8°)
B : CCW Compliance Margin(Address0x1B) = 0x01 (Approximately 0.29°)
C : CW Compliance Margin(Address0x01A) = 0x01(Approximately 0.29°)
D : CW Compliance Slope(Address0x1C) = 0x40 (Approximately 18.8°)
Instruction Packet
Instruction = WRITE_DATA, Address = 0x1A, DATA = 0x01, 0x01, 0x40, 0x40
Communication
->[Dynamixel]:FF FF 00 07 03 1A 01 01 40 40 59 (LEN:011)
<-[Dynamixel]:FF FF 00 02 00 FD (LEN:006)
Status Packet Result NO ERROR
The effect of a Compliance Slope changes at the boundary of 2
n
(n is positive
Goal Position
CW
X:Angle Error
CCW
CW
CCW
Goal Position
CW
CCW
CW
CCW
B
A
C
D
Angle(Position)
Output Torque