Dynamixel dx-116 – Robotis DX-116 User Manual
Page 19
18
English Translation by: Tribotix Pty Ltd
www.tribotix.com
DYNAMIXEL
DX-116
Address 0x2F
Lock. If set to 1, only Address 0x18 ~ Address 0x23 can be written to. Other
areas are not permitted. Once locked, it can only be unlocked by powering down.
Address 0x30,0x31 Punch. Minimum current being supplied to the motor during an action. The
minimum value is 0x20 and the maximum value as 0x3ff.
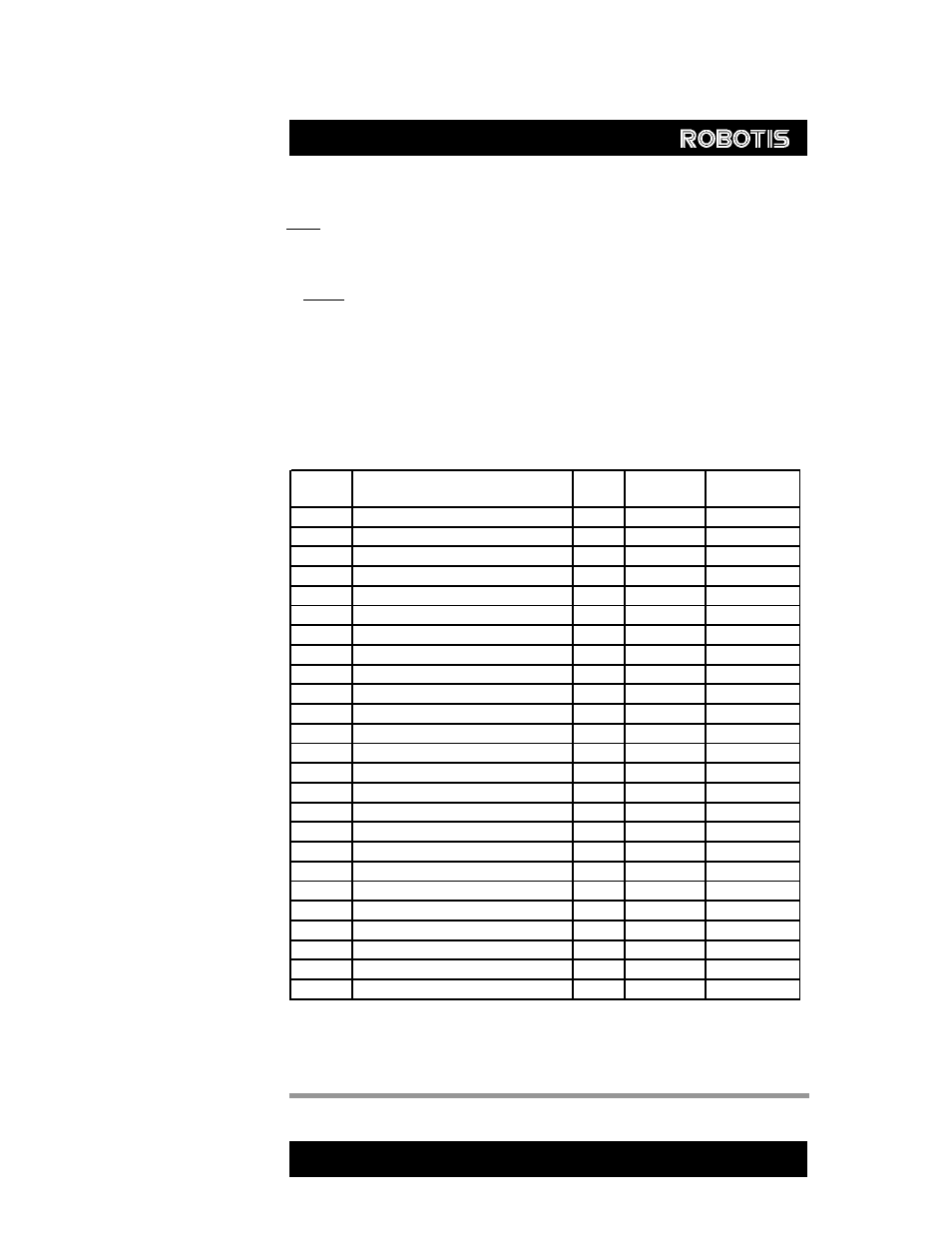
Range
Each Register has an operative range. Write instructions made outside of these
ranges will return an error. The following table summarises the data range for
each register. 16 bit data registers are indicated as (L) and (H), two bytes. Each
byte of a two byte register can be written to independently.
Write
Address
Writing Item
Length
(bytes)
Min
Max
3(0X03)
ID
1
0
253(0xfd)
4(0X04)
Baud Rate
1
0
254(0xfe)
5(0X05)
Return Delay Time
1
0
254(0xfe)
6(0X06)
CW Angle Limit
2
0
1023(0x3ff)
8(0X08)
CCW Angle Limit
2
0
1023(0x3ff)
11(0X0B)
the Highest Limit Temperature
1
0
150(0x96)
12(0X0C)
the Lowest Limit Voltage
1
50(0x32)
250(0xfa)
13(0X0D)
the Highest Limit Voltage
1
50(0x32)
250(0xfa)
14(0X0E)
Max Torque
2
0
1023(0x3ff)
16(0X10)
Status Return Level
1
0
2
17(0X11)
Alarm LED
1
0
127(0x7f)
18(0X12)
Alarm Shutdown
1
0
127(0x7f)
19(0X13)
(Reserved)
1
0
1
24(0X18)
Torque Enable
1
0
1
25(0X19)
LED
1
0
1
26(0X1A)
CW Compliance Margin
1
0
254(0xfe)
27(0X1B)
CCW Compliance Margin
1
0
254(0xfe)
28(0X1C)
CW Compliance Slope
1
1
254(0xfe)
29(0X1D)
CCW Compliance Slope
1
1
254(0xfe)
30(0X1E)
Goal Position
2
0
1023(0x3ff)
32(0X20)
Moving Speed
2
0
1023(0x3ff)
34(0X22)
Torque Limit
2
0
1023(0x3ff)
44(0X2C)
Registered Instruction
1
0
1
47(0X2F)
Lock
1
1
1
48(0X30)
Punch
2
0
1023(0x3ff)
[Control Table Data Range and Length for Writing]