Calibration tools - revcountcal and compasscal, Alibration, Ools – Pioneer 2 / PeopleBot User Manual
Page 59: Revcountcal and compasscal, Saphira required
ActivMedia Robotics
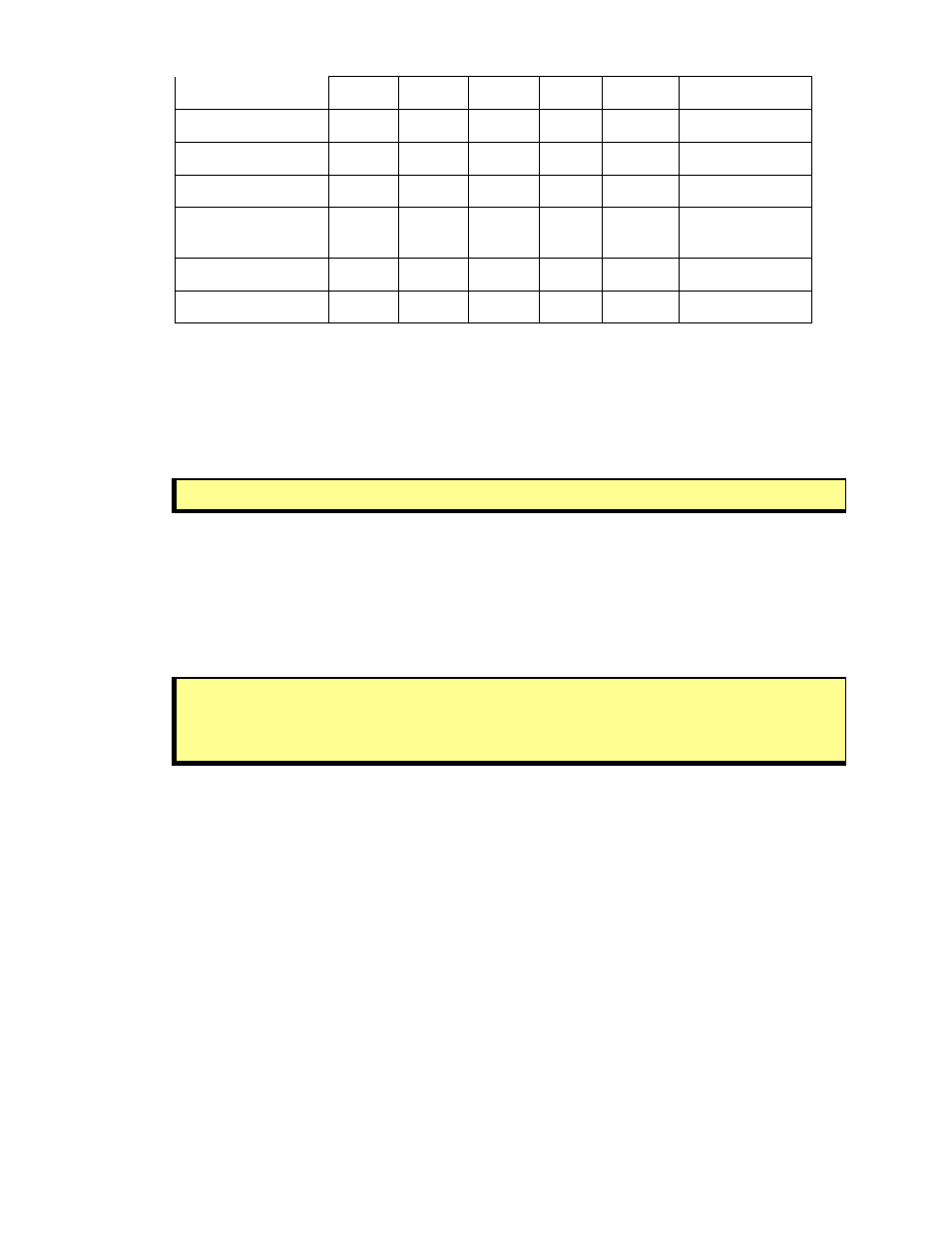
Parameter DX
DXe
AT
CE
PB
V1
Performance
PB
Encoder ticks per rev
500
500
500
100
500
500
Gear ratio
19.7
19.7
85.5 19.7 38.3
38.3
Wheel
diam
(mm) 165 191 220 165 165
191
Encoder ticks per mm
wheel rotation
76 66 49 76 148
128
DistConvFactor 0.840
0.969
1.32
0.826
0.413 0.424
DiffConvFactor
0.0056 0.0057 0.0034 0.0056 0.0056
0.0060
Calibration Tools - revcountcal and compasscal
P2OS 1.4 introduced two new P2OS calibration tools: revcountcal and compasscal.
Both tools are for helping your robot and its V-2XG compass accessory adapt to your
unique operating environment.
Compasscal is for the V 2XG compass only; not for the TCM2 Module.
The revcount calibration tool helps you redefine the differential encoder counts that
describes a full 360-degree turn of your robot. The default revcount value works fine for
smooth, hard surfaces, but it can change dramatically for other operating environments,
particularly for the Pioneer 2-AT on loose outdoor versus hard indoor surfaces.
The compass tool lets owners calibrate their integrated electronic compass for various
environments and positions on the robot.
Saphira required
CompassCal and RevcountCal only work with licensed and properly
installed Saphira.
Note that unlike the p2oscf and p2osdl tools, the compass and revcount calibration
tools use the Saphira operating environment. Hence, the programs need to be located
in the bin/ directory of a licensed Saphira installation.
A Saphira license comes with your ActivMedia Mobile Robot, and you may retrieve new
licensed versions from the http://robots.activmedia.com support website. See
Chapter 3, "Quick Start", for additional detail.
Briefly, the programs operate in two stages. First, they connect with your Pioneer 2 or
PeopleBot robot via a Saphira-based client and retrieve the robot’s current operating
parameters via the ENCODERpac or CONFIGpac extended SIPs (see previous chapter).
Following program prompts, you change the orientation of the robot or compass—rotate
the compass and/or the robot—and the program calculates a new revcount value or X
and Y offsets for the electronic compass. The process may be repeated indefinitely,
each time calculating fresh values; they are not recorded or changed in your robot’s
FLASH.
In a second stage, the calibration utilities let you save the last-acquired parameter to
your P2OS microcontroller’s FLASH ROM, so that the new value gets used by the robot
53