Aria, Saphira – Pioneer 2 / PeopleBot User Manual
Page 12
to use your robot, but it will not appear on your own menu since it copies
functionalities of Navigator, which you may not distribute.
!
M
APPER
provides the tools you need to construct a map of your robot’s real
operating space (“world”). Navigator and WorldPass use this map floor plan to
plan a path from one point to another within a space.
!
T
RAINER
is a programming editor and robot interface in which you create and
perfect your own intelligent mobile robot-control programs with the simple, yet
powerful Colbert programming language.
!
S
IMULATOR
is not a separate module of Basic Suite. It is a connection option that
provides a virtual replacement for your robot. By connecting to the simulator
instead of a real robot, you can test Colbert programs, maps, and so on, when
the real robot isn’t practical or available.
!
A
MIGO
S
OUNDS
is for AmigoBot
only. With AmigoSounds, you assemble recorded
sounds stored on your PC’s disk into a playlist of sounds for your AmigoBot. With
AmigoSounds, you may give AmigoBot
different audio-based personalities.
ARIA
The ActivMedia Robotics Interface for Applications (ARIA) is C++-based open-source
development environment that provides a robust client-side interface to a variety of
intelligent robotics systems, including your ActivMedia robot’s controller and accessory
systems.
ARIA is the ideal platform for integration of your own robot-control software, since it
neatly handles the lower-level details of client-server interactions, including serial
communications, command and server-information packet processing, cycle timing,
and multithreading, as well as a variety of accessory controls, such as for the PTZ robotic
camera, the P2-Gripper, scanning laser-range finder, and motion gyros, among many
others.
What’s more, it comes with source code so that you may examine the software and
modify it for your own sensors and applications.
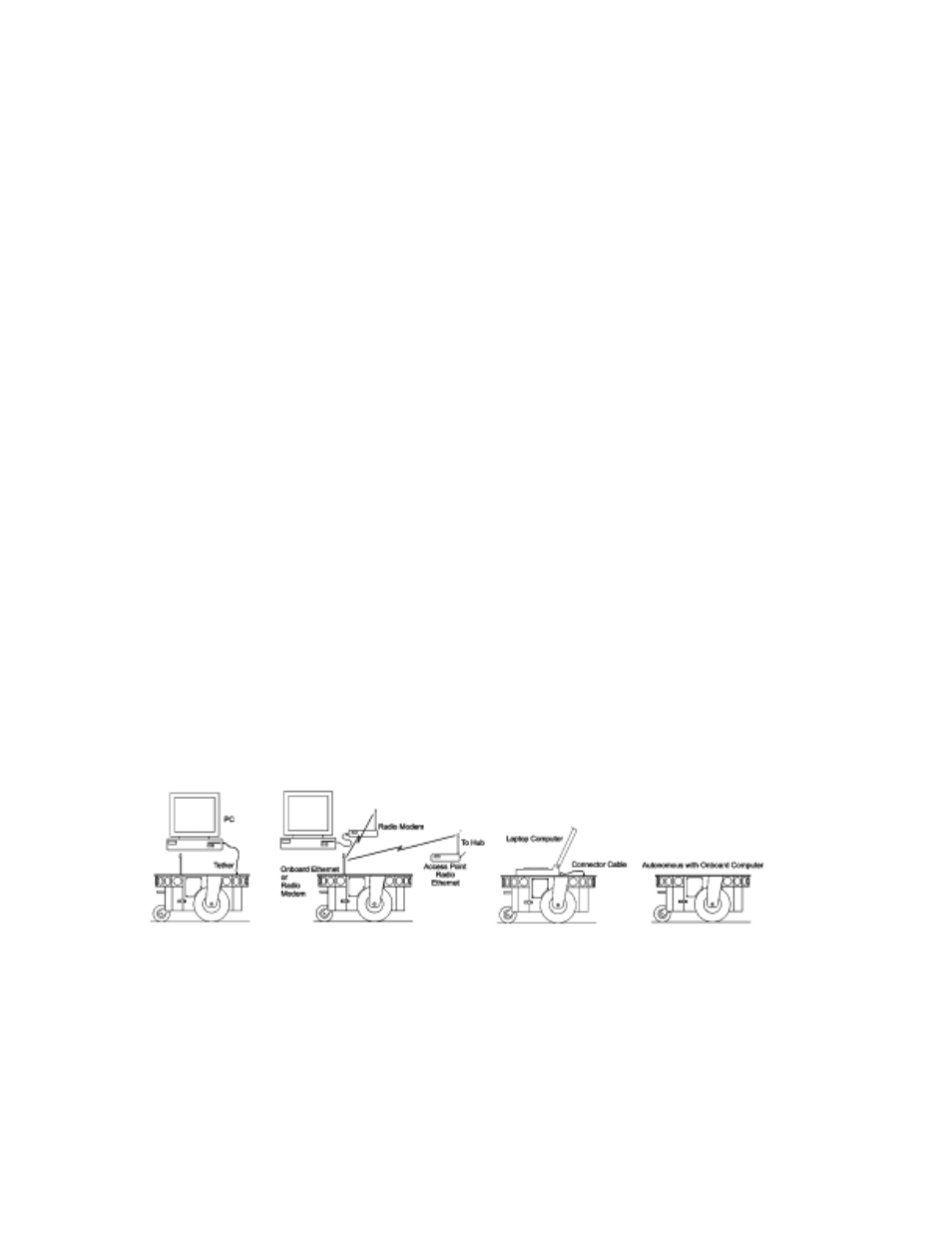
Figure 5. ActivMedia robots require a computer, typically a Windows
©
9x/ME- or
RedHat
©
Linux-based PC, to run client software for intelligent robotics command
and control operations.
Saphira
Saphira, including the Colbert language, is a full-featured robotics control environment
developed at SRI International’s Artificial Intelligence Center. Saphira and its ARIA
foundation form the robotics-control and applications-development foundation for
6