Configuring p2os operating parameters, Steps 1–3: preparing for configuration, Step 4: run p2oscf – Pioneer 2 / PeopleBot User Manual
Page 54: Step 5: changing configuration parameters, Onfiguring, P2os o, Perating, Arameters
Updating and Reconfiguring P2OS
Configuring P2OS Operating Parameters
The program p2oscf(.exe) is the way you view and change your Pioneer 2’s identity
and operating parameters.
Limited reconfigurations.
FLASH ROM in the controller is guaranteed for only 100 erase cycles.
Steps 1–3: Preparing for Configuration
Prepare for changing your robot’s configuration parameters identically to Steps 1, 2 and
3 for updating P2OS described above.
Step 4: Run p2oscf
As with p2osdl, you will find p2oscf(.exe) in the p2os/ directory of your PSOS
distribution. The program accepts optional arguments (Table 12); the argument-less
default startup is to connect with your robot’s P2OS microcontroller through your PC’s
serial port /dev/ttyS0 in Linux/UNIX systems or COM1 with Win32. With the default, you
may double-click to launch psoscf.exe directly from your desktop, rather than
executing the program from the MS-DOS Prompt window.
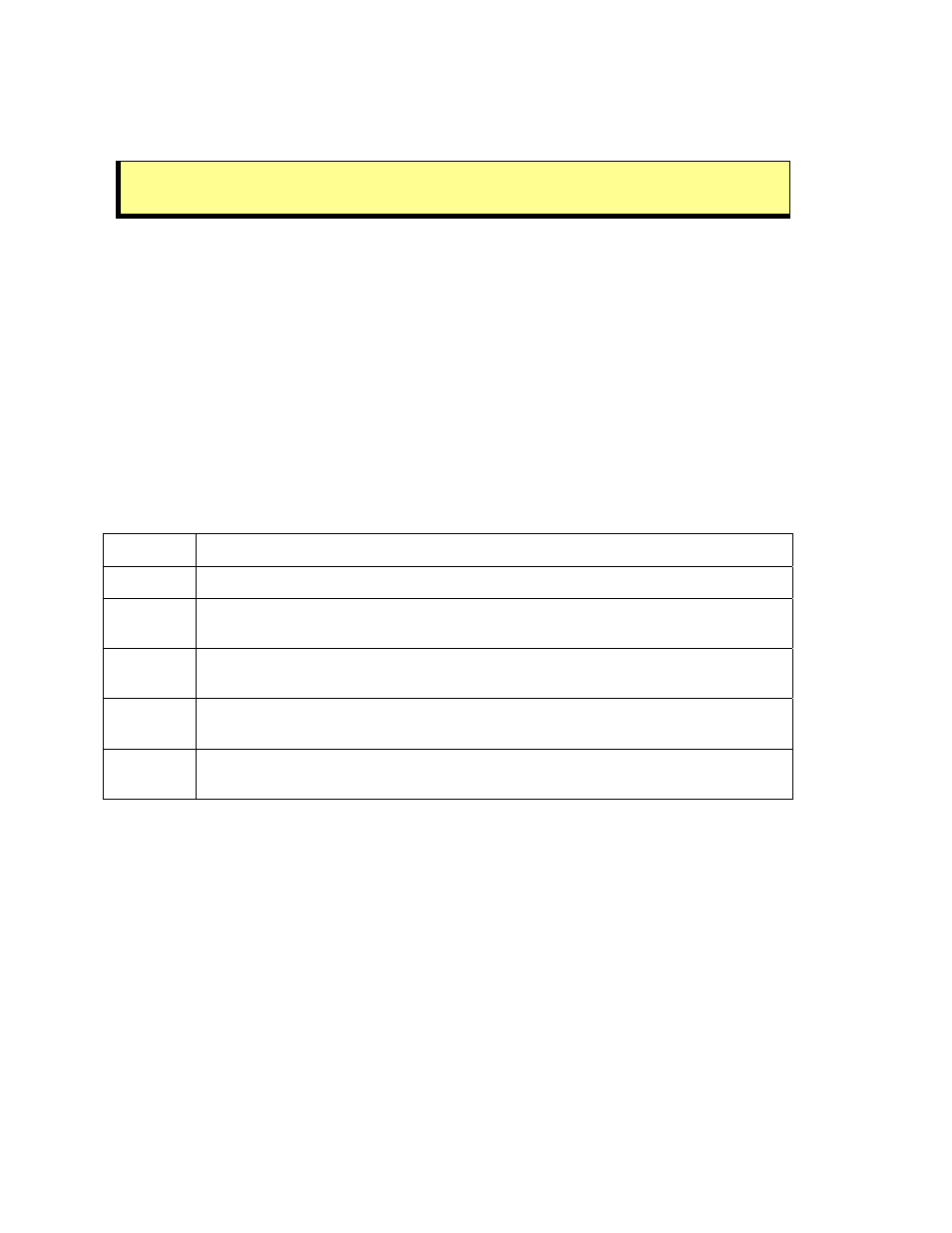
Table 13. p2oscf startup options
Argument Description
-h
List p2oscf argument options and quit
-b
Batch mode; series configuration command must follow.
Configuration changes made to FLASH parameters
-n
Operate p2oscf without connecting with the microcontroller.
Useful for editing parameter files saved to disk.
-p
Set serial port; serial port name must follow immediately
after argument; /dev/ttyS1 or COM3, for example.
-s
Automatically save changes to disk file named in path
immediately following argument.
Step 5: Changing Configuration Parameters
On start up (after power cycle or RESET), P2OS reads a set of operating parameters from
its FLASH memory and uses these values if and until you override them with explicit P2OS
commands. For instance, a default maximum velocity is stored in the TransVelMax
parameter. After establishing a client-server connection, you may send a SETVEL
command which changes that default maximum velocity.
Normally when it starts, p2oscf automatically retrieves the current identifying and
operating parameters from your Pioneer 2 or PeopleBot robot. Some of the parameters,
"Constants", are not to be changed. The others, "Variables", are the identifying and
operating parameters that you may edit with p2oscf.
With p2oscf, you edit a temporary copy of the parameters list. Your changes are not
changed in your robot’s FLASH memory until you choose to explicitly "save" them. Even
then, p2oscf will write to FLASH only if you have changed some parameter value. Writes
to the C166 FLASH are guaranteed for only 100 cycles, so we caution that you
reconfigure/update your P2OS microcontroller only when necessary.
48