Step 6: save your work, Editing p2os parameters, Diting – Pioneer 2 / PeopleBot User Manual
Page 55: P2os p, Arameters
ActivMedia Robotics
Step 6: Save Your Work
Use the save command to save your configuration changes to FLASH or to a disk file. We
strongly recommend that you save each of your robots’ parameter values to disk for
later retrieval should your microcontroller get damaged or it’s FLASH inadvertently
erased. Default parameter files come with each P2OS distribution, but it is tedious to
reconstruct an individual robot’s unique configuration.
Editing P2OS Parameters
To view the list of current P2OS constants or variables, type ‘a’, 'c' or 'v', respectively,
followed by a return (Enter). Similarly, type '?' or 'help' to see a list of p2oscf
commands.
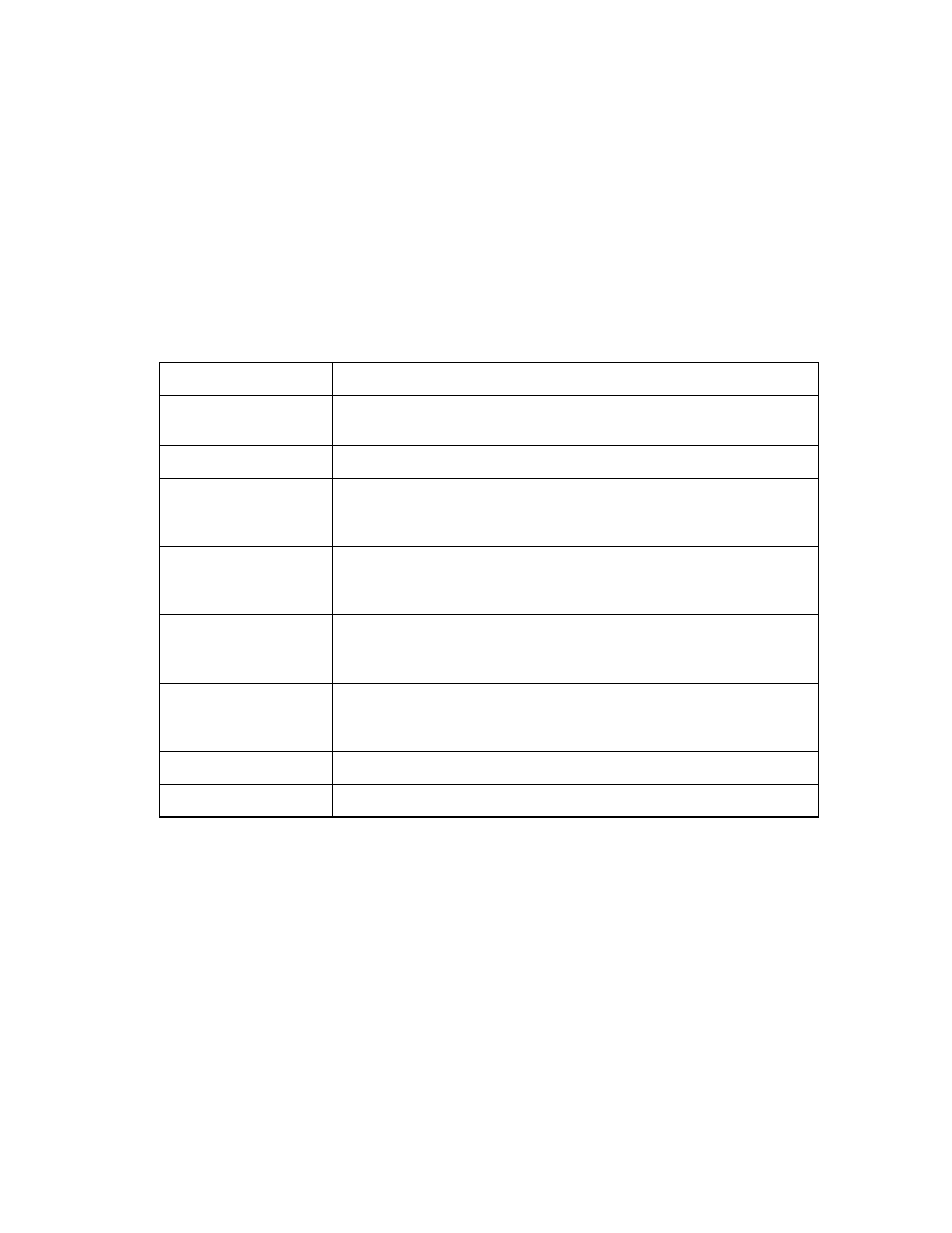
Table 14. p2oscf control commands
Command
Description
keyword
Alone, keyword displays current, edited value. Add
value argument to change current value.
c or constants
Display P2OS constant values. User cannot change.
v or variables
Display current, edited P2OS operational values;
may be different than values currently stored in
FLASH on the robot.
a or arm
Display current, edited P2OS-based Arm-related
values. May be different than those stored in
FLASH on the robot.
r or restore
Restores edited (p2oscf) variables to values
currently stored in FLASH or from file, if
argument included.
save
Saves current edited values to FLASH and exits
program or saves current edited values to disk for
later reference and continues in editor.
q or quit
Exits p2oscf without saving any changes to flash.
? or help
Displays commands and descriptions.
To see an individual parameter's current value, type its keyword alone. To change a
P2OS parameter's value, type its keyword followed by the replacement value. That
value may be a string (no quotes or spaces) or a decimal or hexadecimal ("0xN")
number. For example, to change the watchdog timeout to four seconds, type:
> watchdog 4000
or
> watchdog 0xfa0
The critical operating parameters for your robot are revcount, encoder, and the PID
control parameters. If you get them wrong, your robot won’t run properly. Note, too,
that your p2oscf-edited parameters are not used by P2OS unless and until you save
them to FLASH. And, too, you may over-ride many of these parameters with respective
P2OS commands from the client.
49