Printer control circuit, 3) ssp register access method, 1) block diagram – Sharp ER-A440 User Manual
Page 20: 2) general description of the printer controller, 3) printer motor drive circuit
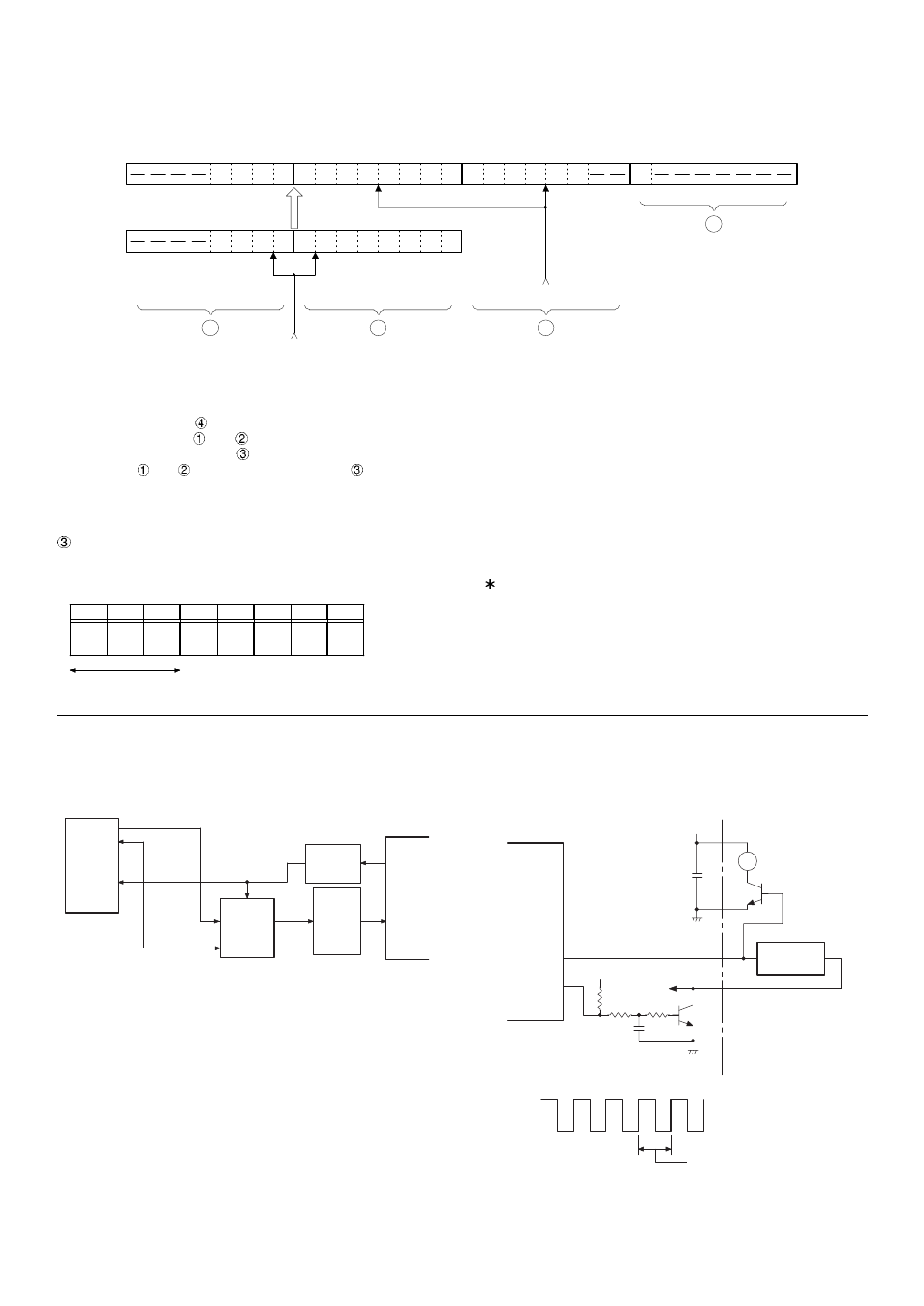
3) SSP register access method
Access to SSP break address register is performed through the tem-
porary register as shown below:
Fig. 6-5
Enable flags can be accessed individually.
Though enable register
can be accessed individually, writing to
brake address registers
and
is performed at the same time as
writing to brake address register
through the temporary register.
Therefore, set
and
to temporary, then write into
at last.
Since the temporary register is commonly used by BAR sets, thefol-
lowing register setting is performed after completion ofsetting of each
break address register.
SSP control method
Access to the enable register and the brake address register is only
possible when writing to them from the CPU.
Information on which brake register the SSP brake is detected in is
read as binary data by reading address FFFFFFH (*1).
Used in an expanded register.
Normally is a reserve bit. Whenreading, fixed to 0.
If there are 32 break registers, binary expression is made with the
above 5 bits, and 0th is “00000
B
” and 31st is “11111
B
.”
When detected simultaneously by two or more break registers,
onewith the smaller BAR number is read as binary data.
The brake signals (NMI) and the above detection data (CMP0~4)
areheld until the above detection data are read. So read should be-
made in the NMI sub routine. (Clear by FFFFFFH read.)
1: FFFFFFH is not fulldecoded. (FFFF00H~FFFFFFH). There-
fore,unnecessary read access in parentheses should not be
performed.
1
2
3
4
A19 A18 A17 A16 A15
A8
A7
A2
EN
WR
WR
Temporary
Temporary
bit 7
6
5
4
3
2
1
0
0
0
CMP4
0
CMP3 CMP2 CMP1 CMP0 (FFFFFFH)
7. PRINTER control circuit
1) Block diagram
Fig. 7-1
2) General description of the printer controller
The DP-730 is used as the R/J printer. The printer mechanical timing
control is made by the CPU through MPCA7.
3) Printer motor drive circuit
When the MTD is high, the motor rotates.
When the MTD is low, the motor stops.
CPU
Data
bus
MPCA7
DRIVER
PRINTER
(DP-730)
RECEIVER
Address bus
MTD
MPCA7
M
Speed limiter
circuit
2.2K
R128
+24V
C92
DP
Normal 555µs (516~590µs)
Main PWB side
Printer side
R127
COM
Q7
C227
MTD
DP
4 – 13