Pc master software api variables, Bldc motor control, Freescale semiconductor, inc – Motorola M68HC08 User Manual
Page 52
BLDC Motor Control
Designer Reference Manual
DRM028 — Rev 0
52
BLDC Motor Control
MOTOROLA
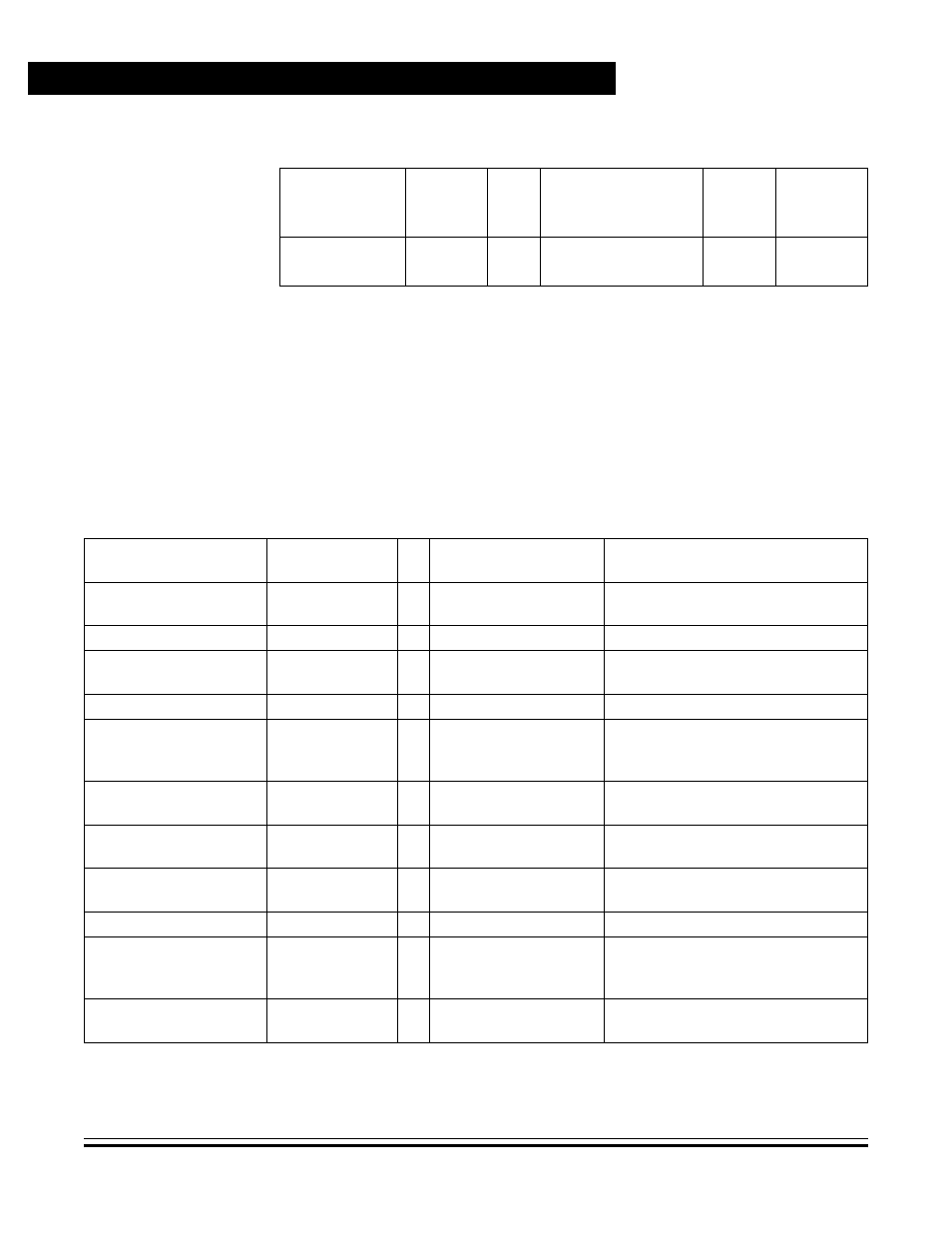
3.4.1.3 PC Master Software, BLDC Control MCU Software API, Communication Variables
The application interface, data variables used for the exchange between
the BLDC control MCU software and PC master software, are shown in
. These variables are used for status sensing and control. PC
master software accesses these bytes directly from their physical
memory addresses.
Set manual
mode
02
None
Setting of manual
mode
00
55
OK
Failed
Table 3-1. PC Master Software Communication Commands
Command
Comman
d
Code
Data
Byte
s
Demo
Suitcase Action
Respon
s
Byte
Response
Descriptio
n
Table 3-2. PC Master Software API Variables
Name
Type
I/
O
Representing
Range
Description
Sys3
Sys3_Def
I/
O
8flags
System variable #3
Motor_Ctrl
Motor_Ctrl_Def
I
8flags
Motor control variable
Motor_Status
Motor_Status_D
ef
O
8flags
Motor status variable
Failure
Failure_Def
O
8flags
Failure variable
Sp_Input
U8
I
< 0; 255>
Speed input variable used for
required
speed calculation
Speed_Range_Max_RP
M
U16
O
< 0; 65535>
[rpm]
Speed range maximum
Speed_Max_RPM
U16
O
< 0; 65535>
[rpm]
Maximal speed limit
Speed_Min_RPM
U16
O
< 0; 65535>
[rpm]
Minimal speed limit
Commut_Rev
U8
O
< 0; 255>
Commutations per motor revolution
Curr
S8
O
<-Curr_Range_Max_c
A;
Curr_Range_Max_cA)
dc-bus current
Curr_Range_Max_cA
S16
O
<-32768;32767>
[A*10^-2]
Current range maximum
[A*10^-2]
F
re
e
sc
a
le
S
e
m
ic
o
n
d
u
c
to
r,
I
Freescale Semiconductor, Inc.
For More Information On This Product,
Go to: www.freescale.com
n
c
.
..