Mutual capacitance model, Bldc motor control, Freescale semiconductor, inc – Motorola M68HC08 User Manual
Page 34
BLDC Motor Control
Designer Reference Manual
DRM028 — Rev 0
34
BLDC Motor Control
MOTOROLA
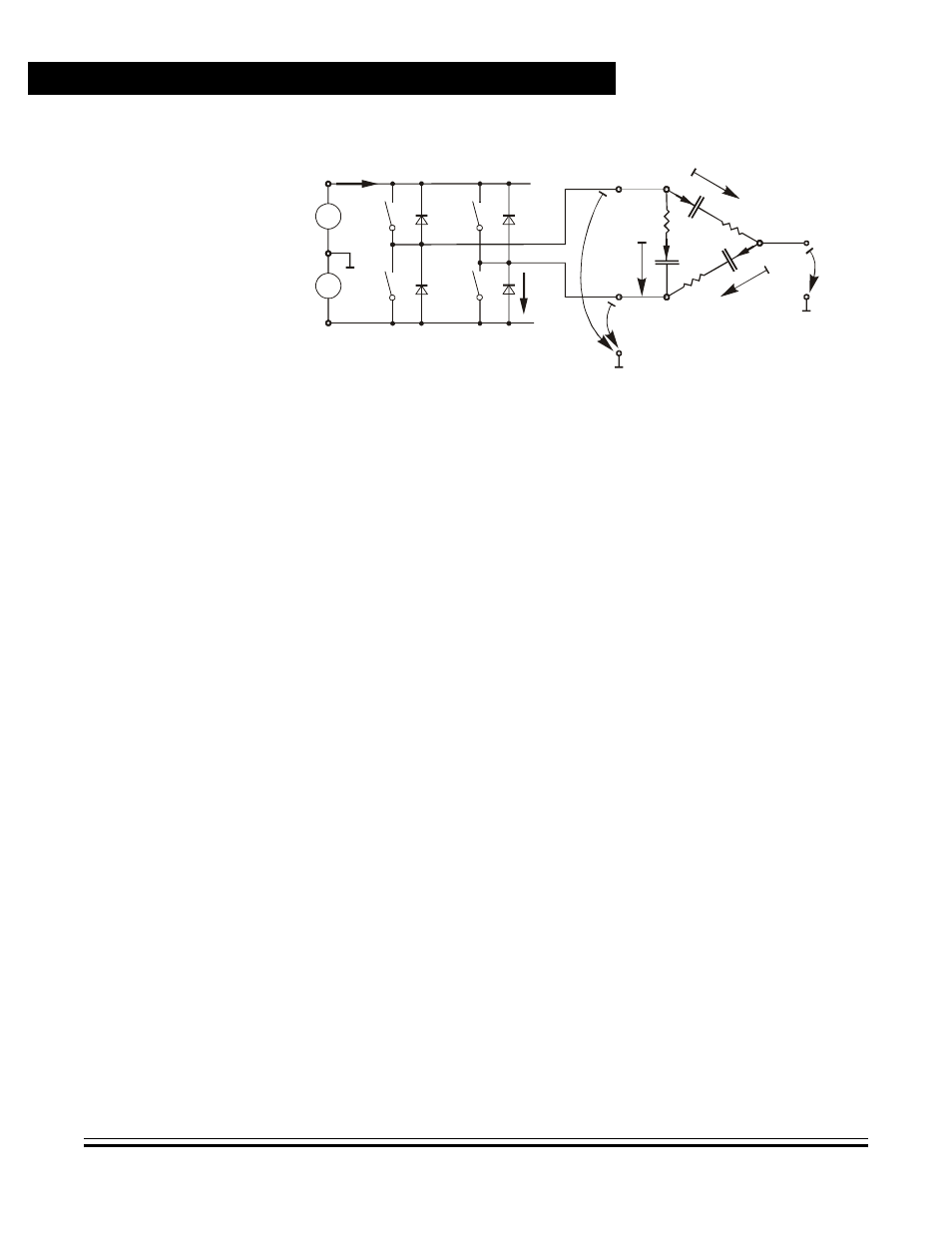
Figure 3-9. Mutual Capacitance Model
Let us focus on the situation when the motor phase A is switched from
negative dc-bus rail to positive, and the phase B is switched from
positive to negative. This is described by these conditions
(EQ 3-8.)
:
(EQ 3-8.)
The voltage that disturbs the back-EMF sensing, utilizing the free (not
powered) motor phase C, can be calculated based the equation:
(EQ 3-9.)
The final expression for disturbing voltage can be found as follows:
(EQ 3-10.)
NOTE:
(EQ 3-10.)
expresses the fact that only the unbalance of the mutual
capacitance (not the capacitance itself) disturbs the back-EMF sensing.
When both capacities are equal (they are balanced), the disturbances
disappear. This is demonstrated in
.
u
Ccb
B
C
A
RC
C
C
C
RC
RC
u /2
d
=
+
-
u /2
d
=
+
-
u
Cba
I
d0
S
At
S
Bt
S
Ab
S
Bb
I
Sb
i
C
i
Cab
i
C
u
Cac
u
VC Cap
u
VB
u
VA
S
Ab
S
Bt
,
PWM
←
u
VA
1
2
---u
d
–
1
2
---u
d
→
=
u
VB
1
2
---u
d
1
2
---u
d
–
→
=
,
i
Cac
i
Ccb
i
C
=
=
u
VC Cap
1
2
--- u
Ccb
u
Cac
2R
C
+
+
(
)
u
Ccb
R
C
+
(
)
–
1
2
--- u
Cac
u
Ccb
–
(
)
=
=
u
VC Cap
1
2
---
1
C
ac
--------
1
C
cb
--------
–
i
C
t
d
∫
1
2
---
C
cb
C
ac
–
C
cb
C
ac
⋅
----------------------
i
C
t
d
∫
=
=
F
re
e
sc
a
le
S
e
m
ic
o
n
d
u
c
to
r,
I
Freescale Semiconductor, Inc.
For More Information On This Product,
Go to: www.freescale.com
n
c
.
..