4 start/stop mode, 5 reinitialisation of the encoder, 2 standard operation (can transmission modes) – ifm electronic RM9000 User Manual
Page 9: 3 storing parameters, 1 object directory
UK
CANopen encoder
9
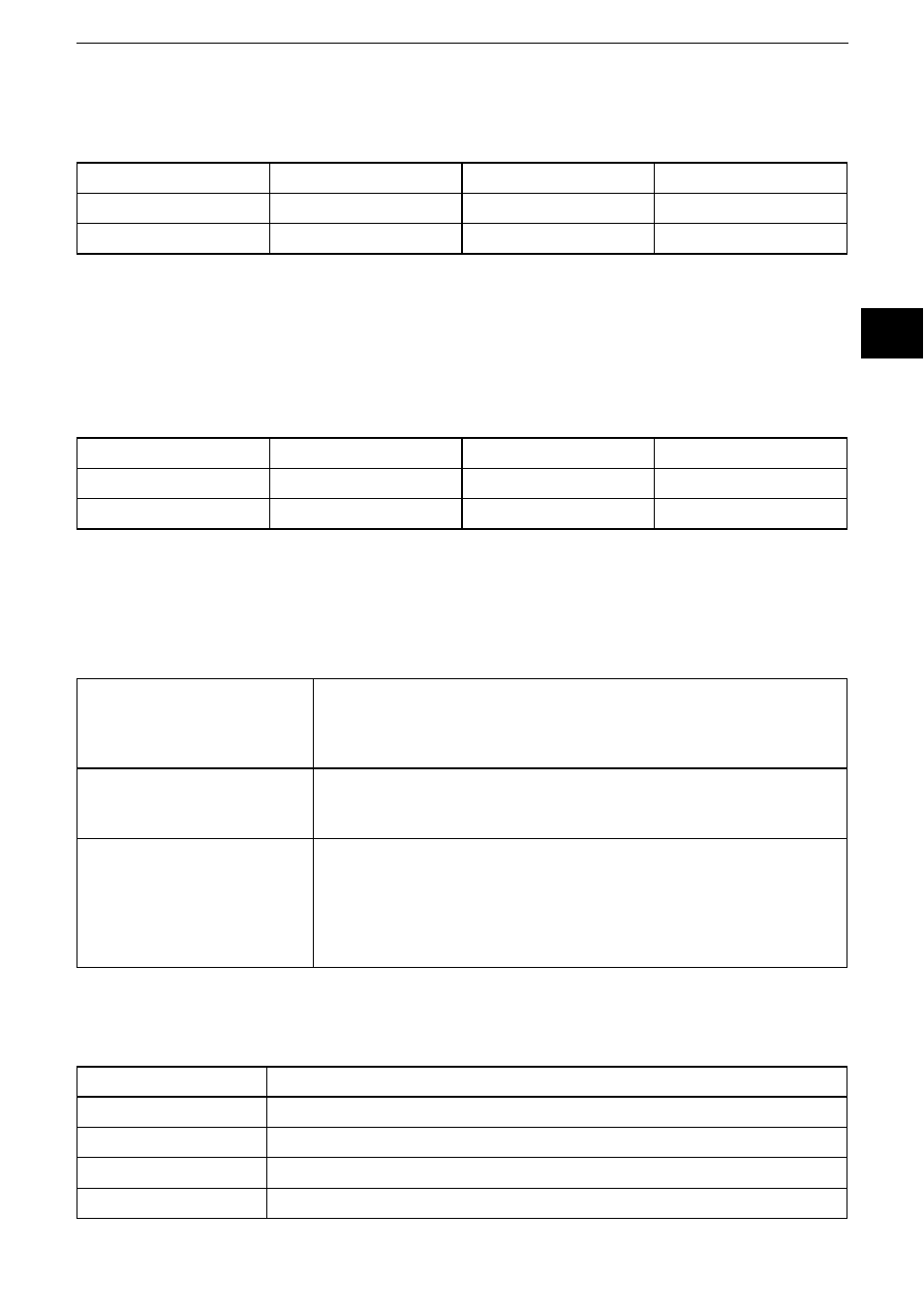
6.1.4 Start/stop mode
To set the encoder to the stop mode, the master must send the following message:
Identifier
Byte 0
Byte 1
Description
0 h
02 h
00
NMT stop, all nodes
0 h
02 h
NN
NMT stop, NN
NN: node number
It is possible to set all nodes (byte 1 = 0) or individual nodes (byte 1 NN) to the
stop mode�
6.1.5 Reinitialisation of the encoder
► Carry out reinitialisation in the event of incorrect function�
Identifier
Byte 0
Byte 1
Description
0 h
81 h
00
reset all nodes
0 h
81 h
NN
reset node
NN: node number
It is possible to reset all nodes (byte 1 = 0) or individual nodes (byte 1 NN)� After
reinitialisation the device replies again in the preoperational mode�
6.2 Standard operation (CAN transmission modes)
RTR mode
The connected host requests the current position value via a remote
transmission request telegram� The encoder reads the current position,
sets off set parameters (if applicable) and returns the position value via
the same CAN identifier�
EVENT time
The absolute encoder cyclically sends the current position value -
without any request by the host� The cycle time can be programmed in
milliseconds for values between 1 ms and 65536 ms�
Sync Mode
When the sync telegram has been received by the host, the encoder
transmits the current process value� If several nodes reply to the sync
telegram, the individual nodes report one after the other according to
their CAN identifier� The programming of an offset time is not necessary�
A sync counter can be programmed so that the encoder does not send
before a defined number of sync telegrams�
6.3 Storing parameters
6.3.1 Object directory
Object Index
Object description
1005h
COB ID Sync
100Ch
guard time
100Dh
life time factor
1016h
consumer heartbeat time