Hitachi SJ 300 User Manual
Page 11
SJ100/L100 / PID / 11
3-3 Example of Set Up
(1) Parameter Set Up under Frequency Control Mode
Before driving the system in PID mode, you set up each required parameter under frequency control
mode. Pay particular attention to the following items.
l Acceleration ramp and Deceleration ramp
The output of the PID calculation (refer to Fig. 3-1) will not immediately be an output frequency of the
inverter. The actual output frequency of the inverter will ramp to the calculated output frequency according
to the set value of acceleration and deceleration ramps. This means that even if you set high D-gain, the
change of the actual output frequency is restricted by the set acceleration and deceleration ramp rates,
and this can lead to unstable control.
To achieve overall stable performance of the PID control, in addition to setting the three gain
parameters (A72, A73, A74), you should set the acceleration and deceleration ramps to the fastest values
the system will allow.
Be sure to re-adjust the PID parameters after you change the acceleration and/or deceleration ramps.
l Jump Frequency / Range
The required condition for setting jump frequency is that there should be no change in feedback value
when frequency is jumped. If there is a stable control point inside the jump frequency range, there will be a
hunting between both ends of the range.
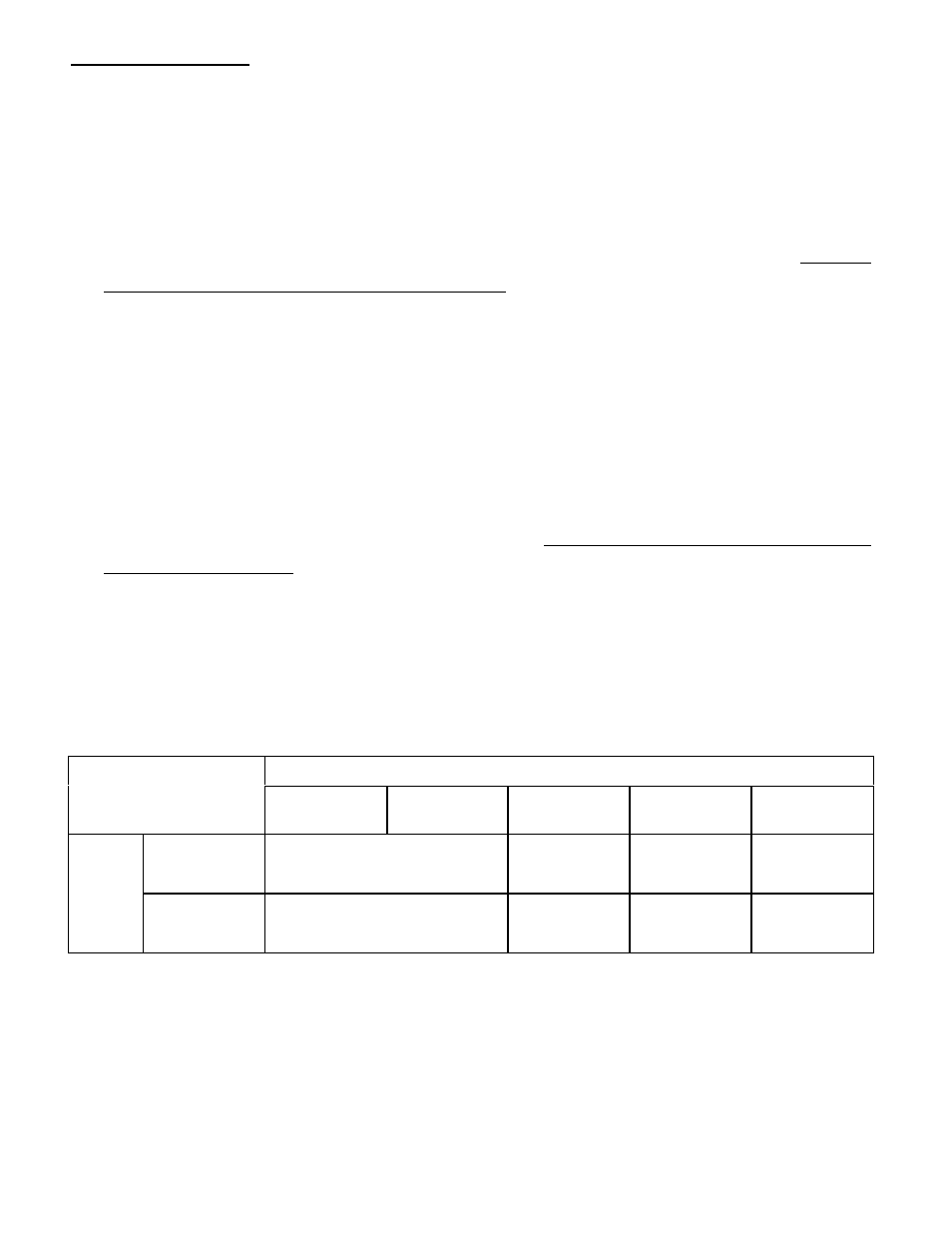
(2) PID Set Up (Target & Feedback)
In PID control mode, the combination of target value and feedback signal sources can be set according to
the following table (Table 3-2).
Table 3-2 How to Set Origins for Target and Feedback
Target Input Source
Integral
Operator
Multi-stage
target (Terminal)
Integral
Potentiometer
Analog Voltage
input (O-L)
Analog Current
input (OI-L)
Feedback
Voltage input
(O-L : 0-10V)
A01
= 02
A76
= 01
A01
= 00
A76
= 01
-
A01
= 01
A76
= 01
Source
Current input
(OI-L : 4-20mA)
A01
= 02
A76
= 00
A01
= 00
A76
= 00
A01
= 01
A76
= 00
-
(1) It is not possible to set both sources to the same analog input terminal.
(2) The inverter will decelerate to a stop according to the set deceleration ramp rate when a stop command is
received while in PID control mode.