Yaskawa F7 Drive Overvoltage Suppression User Manual
Page 6
Date: 09/17/2010, Rev: 09-2010
Page 6 of 9
TM.F7SW.062
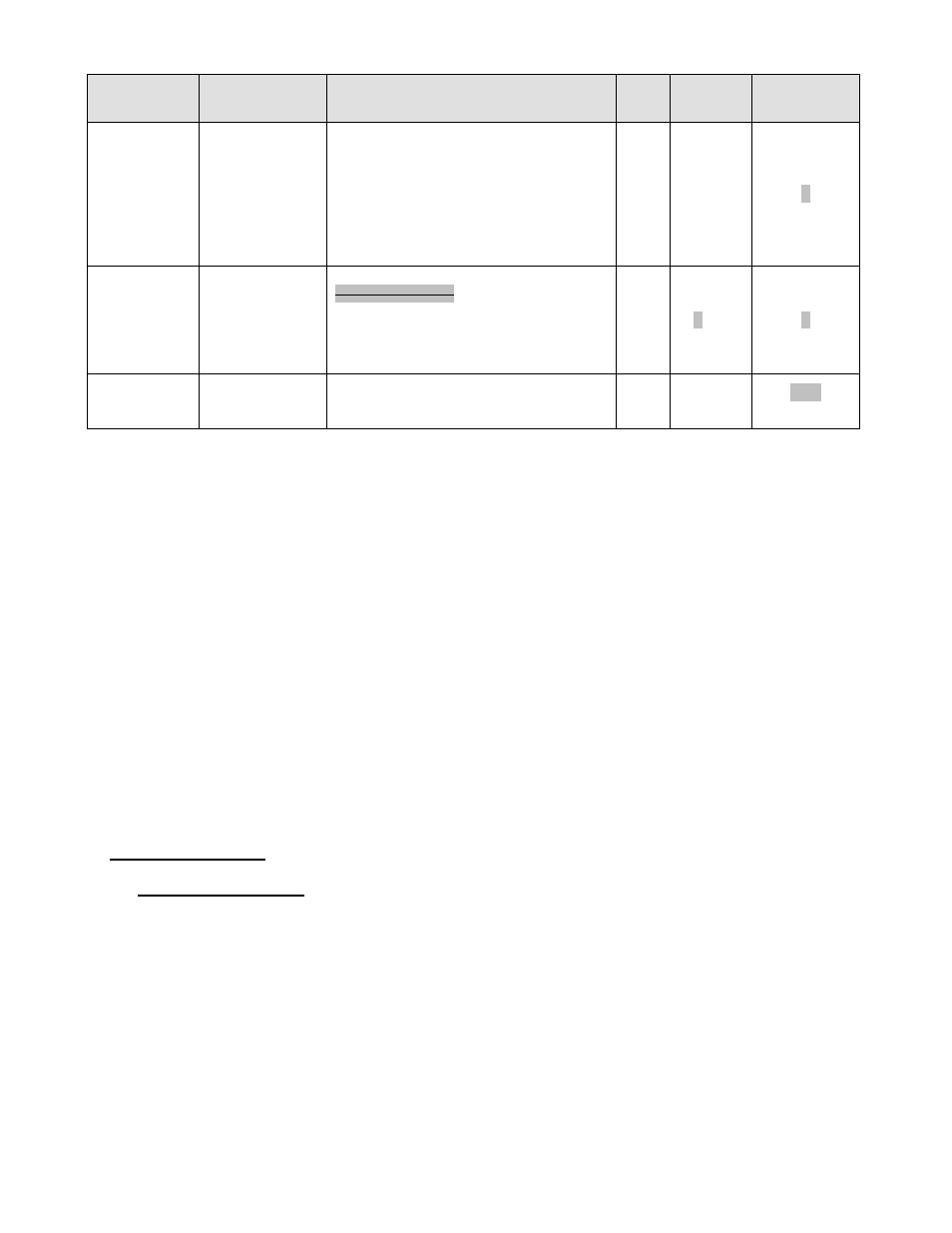
4.6 Parameter Default Changes
Parameter
Name
Description
Units
Range
Default
A1-02
Control Method
0: V/F
1: V/F w/PG
2: Open Loop Vector
3: Flux Vector
Note: The OV Suppression function is
only available in V/F and Open Loop
Vector (A1-02 = 0 or 2).
-
0 ~ 3
0
B1-03
Stopping
Method
0: Ramp to Stop
1: Coast to Stop
2: DC Injection to Stop
3: Coast to Stop With Timer
-
1
~ 3
1
E1-04
Maximum
Output
Frequency
Maximum frequency that the drive will
output.
0.1
Hz
50.0 ~
400.0
90.0
*3
*3: The 90.0 Hz default setting only applies when E1-03 = F (Custom V/f Pattern).
NOTE: The Overvoltage Suppression feature works best in Open Loop Vector (A1-02 = 2), only AFTER a
full Rotational auto-tune is performed (T1-01 = 0). If a Rotational auto-tune cannot be performed, a
Stationary auto-tune can be performed (T1-01 = 1). You must manually set E2-02 (Rated Slip) and E2-03
(No-load Current) from the motor’s nameplate data before running the auto-tune as the Stationary auto-
tuning method will not tune these parameters in this software. If performance is not achieved after the
Stationary auto-tune, use the V/F control mode (A1-02 = 0) instead. See Section 5.2 for further details.
CAUTION: The Overvoltage Suppression function is NOT active when the output frequency is at the
maximum output frequency (E1-04). This is because the function needs frequency headroom to work.
CAUTION: The motor / machinery connected to an F7 drive with this software needs to be mechanically
capable of operation at the maximum output frequency (E1-04).
CAUTION: Bi-directional Speed Search. If motor loading is extremely light at startup, it may be necessary
to disable the bi-directional speed search feature by setting parameter B3-14 = 0. Not doing so may result
in the motor accelerating in the wrong direction.
5.0 Function Description
5.1 Overvoltage Regulator
The motor torque-producing current is detected and subtracted from the OV Regulator setpoint (P1-01).
The result (error) is run through the OV Regulator PI controller. The PI controller will add frequency to the
frequency reference in order to maintain a constant Iq setpoint. The PI controller will NOT subtract
frequency from the frequency reference. This is done to keep the torque producing current positive
(motoring) thus preventing regeneration and subsequent overvoltage faults (OV). This eliminates the need
for a dynamic braking resistor package.