Recommended interface termination, Recommendations for power – MicroE 3500V Mercury User Manual
Page 11
Reference Section
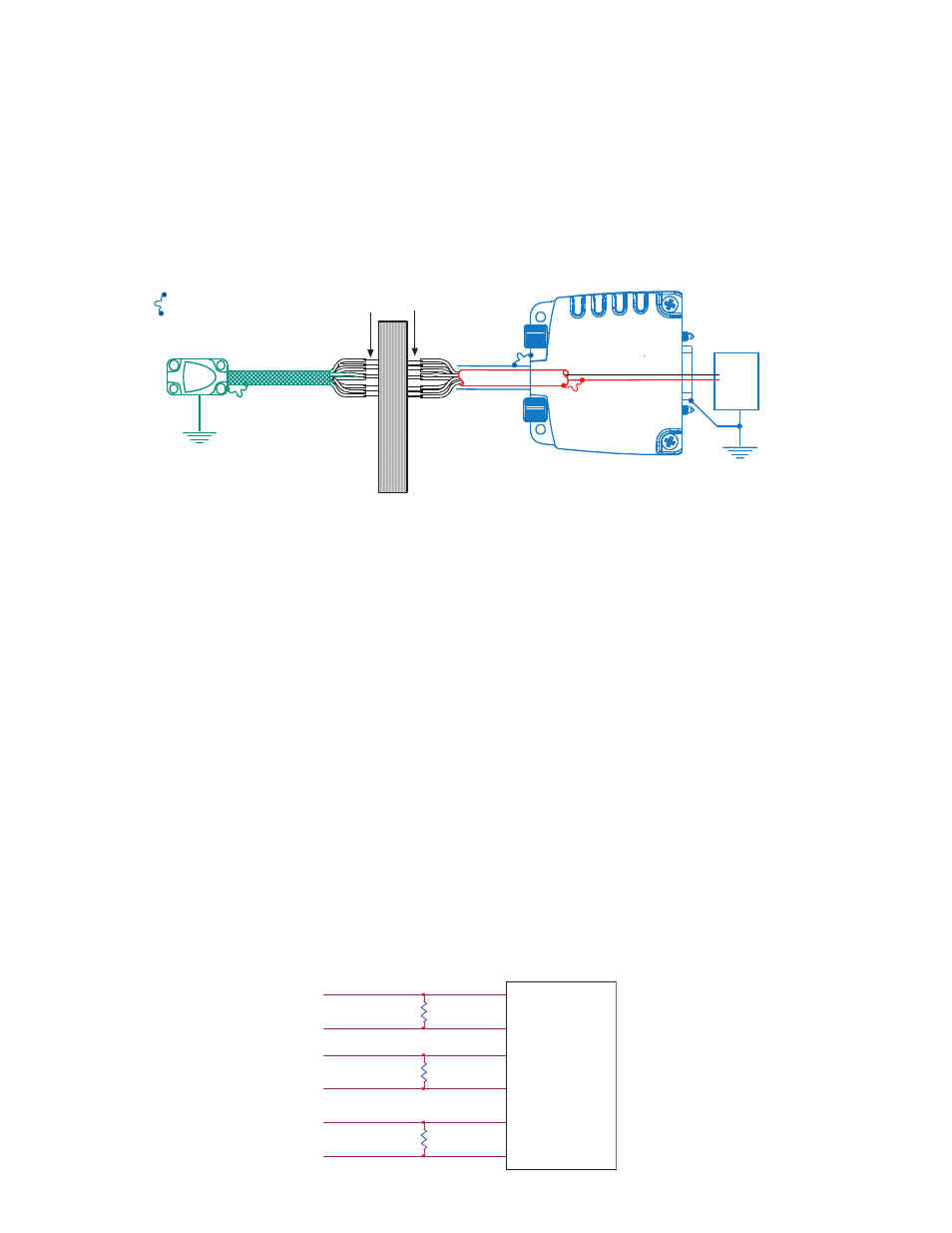
Grounding Instructions for Mercury 2000V and 3000V Encoder Systems
Page 9
Customer Differential Line Receiver
Recommended Interface Termination
B-
IW-
120 ohm
B+
A+
120 ohm
120 ohm
IW+
A-
Vacuum Chamber wall
Connector pins
5 Volts
0 Volts
Power
Supply
Note: Specific applications may require a different grounding scheme.
Please contact MicroE Systems Application grouip with details for assistance.
Electrically conductive
mechanical connection
(as supplied by MicroE
Systems).
Shielding Instructions
Customer-installed connectors at the vacuum chamber wall must electrically shield the signal wires from Electro Magnetic
Interference, Radio Frequency Interference and Electro Static Discharge. The connectors' shielding must completely surround
the wires with no gaps, including intimate electrical contact 360 degrees around the outer cable shields at the ends of the
cables supplied with flying leads. The inner shield of the cable that is attached to the SmartPrecision electronics module must
be electrically isolated from the outer shield.
Important Note
MicroE Systems recommends testing the motion subsystem after the Mercury 2000V and 3000V encoders are installed using
your vacuum through-wall connectors. The testing should prove that the motion system has sufficient immunity to Electro
Magnetic Interference, Radio Frequency Interference and Electro Static Discharge according to the application requirements.
I+
I-
Correct grounding can be implemented in several ways depending on how the customer implements the connections through
the vacuum chamber wall. The diagram below is suitable where:
•The outer cable shields are electrically isolated from each other at the vacuum chamber wall.
•The sensor is mounted with good electrical contact to a well-grounded surface. (Note that an electrical path through
bearings will not result in a well-grounded sensor.)
Mercury encoders require a minimum of 4.75V DC continuously. When designing circuits and extension cables to use Mercury encoders, be sure to
account for voltage loss over distance and tolerances from the nominal supply voltage so that at least 4.75V DC is available to the Mercury encoder
under all operating conditions. The input voltage should not exceed 5.25V DC.
Recommendations for Power
Note: specific applications may require a differnet grounding scheme. Contact MicroE Systems
for applications support.