Acc-1p with jumper e6 on position 1-2, Using flag i/o as general-purpose i/o, General-purpose digital inputs and outputs – Delta Tau PMAC2A-PC/104 User Manual
Page 31
PMAC2A PC104 Hardware Reference Manual
Software Setup
25
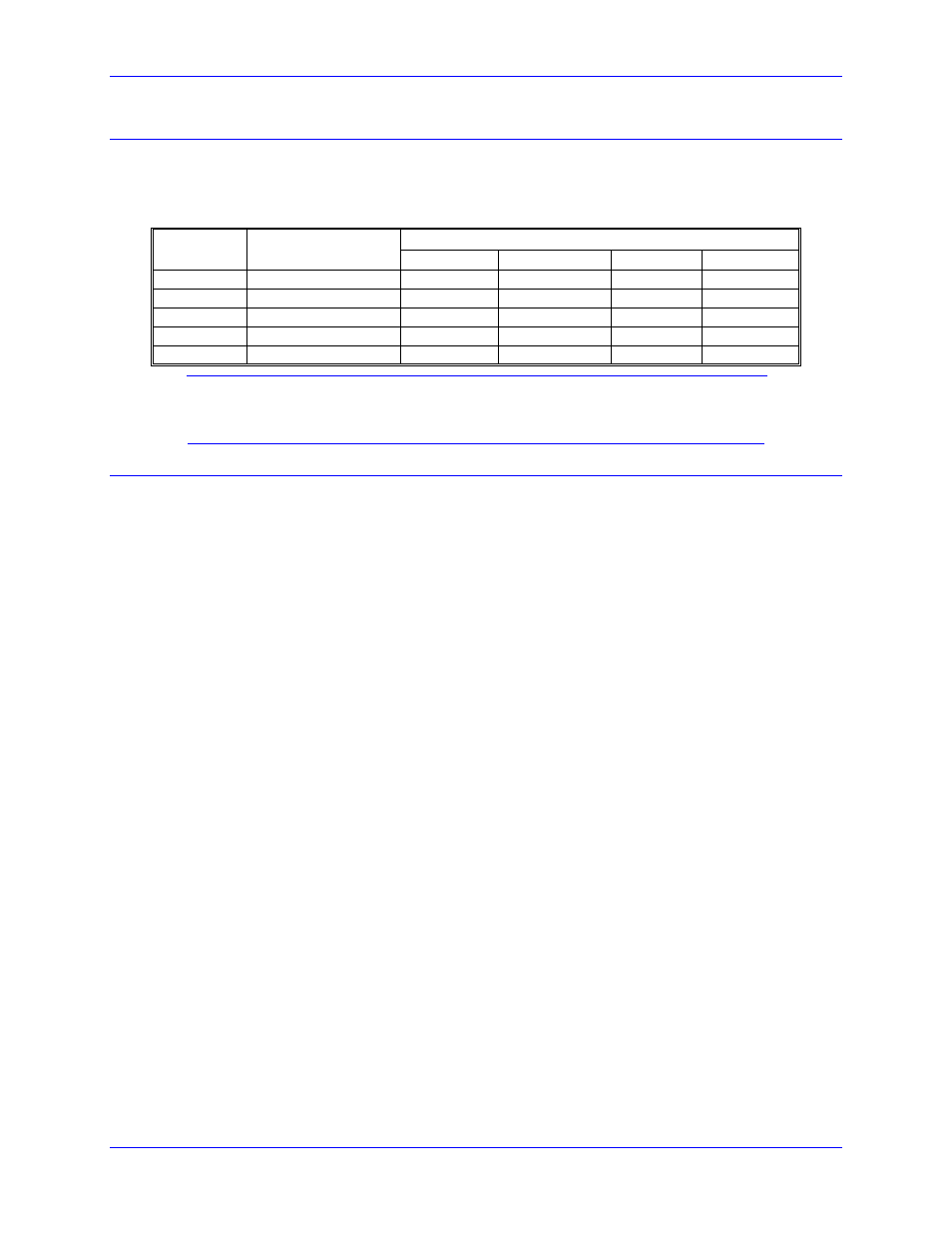
Using Flag I/O as General-Purpose I/O
Either the user flags or other not assigned axes flag on the base board can be used as general-purpose I/O
for up to 20 inputs and 4 outputs at 5-24Vdc levels. The indicated suggested M-variables definitions,
which are defined in the PMAC2 Software reference, allows accessing each particular line according to
the following table:
Channel Number
Flag Type
#1 #2 #3
#4
HOME
5-24 VDC Input
M120
M220
M320
M420
PLIM
5-24 VDC Input
M121
M221
M321
M421
MLIM
5-24 VDC Input
M122
M222
M322
M422
USER
5-24 VDC Input
M115
M215
M315
M415
AENA
5-24 VDC Output
M114
M214
M314
M414
Note:
When using these lines as regular I/O points the appropriate setting of the Ix25
variable must be used to enable or disable the safety flags feature.
General-Purpose Digital Inputs and Outputs
If one Acc-1P is present on the PMAC2A PC/104 stack configuration then its jumpers E5 and E6 should be
set at the default position 1-2. In this case, the lines on its J7 general-purpose I/O connector will be mapped
into PMAC’s address space in register Y:$C080. Jumpers E5 and E6 should be configured on position 2-3
only when two Acc-1Ps are used. In this case, the I/O lines can be accessed at address Y:$C0C0.
If no Acc-1P is present on the PMAC2A PC/104 stack configuration, and only Acc-2P is used, then
jumper E5 on the Acc-2P board should connect pins 1 and 2. In this case the lines on its JOPT general-
purpose I/O connector will be mapped into PMAC's address space in register Y:$C080.
If both Acc-1P and Acc-2P are used, then jumper E5 on the Acc-2P board should connect pins 2 and 3
and its I/O lines can be accessed at address Y:$C0C0.
Typically, these I/O lines are accessed individually with M-variables. Following is a suggested set of M-
variable definitions to use these data lines.
Acc-1P with Jumper E6 on Position 1-2
M0->Y:$C080,0
; Digital Output M00
M1->Y:$C080,1
; Digital Output M01
M2->Y:$C080,2
; Digital Output M02
M3->Y:$C080,3
; Digital Output M03
M4->Y:$C080,4
; Digital Output M04
M5->Y:$C080,5
; Digital Output M05
M6->Y:$C080,6
; Digital Output M06
M7->Y:$C080,7
; Digital Output M07
M8->Y:$C080,8
; Digital Input MI0
M9->Y:$C080,9
; Digital Input MI1
M10->Y:$C080,10
; Digital Input MI2
M11->Y:$C080,11
; Digital Input MI3
M12->Y:$C080,12
; Digital Input MI4
M13->Y:$C080,13
; Digital Input MI5
M14->Y:$C080,14
; Digital Input MI6
M15->Y:$C080,15
; Digital Input MI7
M32->X:$C080,0,8
; Direction Control (1=output, 0 = input)
M34->X:$C080,8,8
; Direction Control (1=output, 0 = input)
M40->X:$C084,0,24
; Inversion control (0 = 0V, 1 = 5V)
M42->Y:$C084,0,24
; J7 port data type control (1 = I/O)