Flowserve StarPac 3 User Manual
Page 17
17
StarPac Intelligent Control System FCD VLENIM0066-05 04/14
flowserve.com
®
supply pressure. When the mechanical stop of the follower arm (positioner) is reached, rotate back approxi-
mately 15 degrees.
9. Hold the take-off arm in place; tighten the take-off arm screw.
NOTE: The take-off arm should be snug enough to hold the follower arm in place
but allow movement when pushed.
10. Connect regulated air supply to appropriate port in manifold.
11. Remove main cover and perform a stroke calibration using the key pad (refer to the StarPac 3 User Interface
Manual. Make sure the StarPac 3 has been configured with the proper air action.
12. If the calibration was successful, continue with step 9. If the calibration failed, the A/D feedback values were
exceeded and the arm must be adjusted away from the positioners limits. Return to step 2 and rotate the arm
back approximately 10 degrees.
NOTE: Remember to remove the air supply before re-adjusting take-off arm.
13. Tighten the nut on the take-off arm. The socket head screw of the take-off arm must be tight, about 40 in-
lb.
NOTE: If the take-off arm slips, the positioner must be recalibrated.
WARNING: Failure to follow the procedure will result in positioner and/or linkage damage. Check air-action and
stroke carefully before lockdown of take-off arm to splined lever adapter.
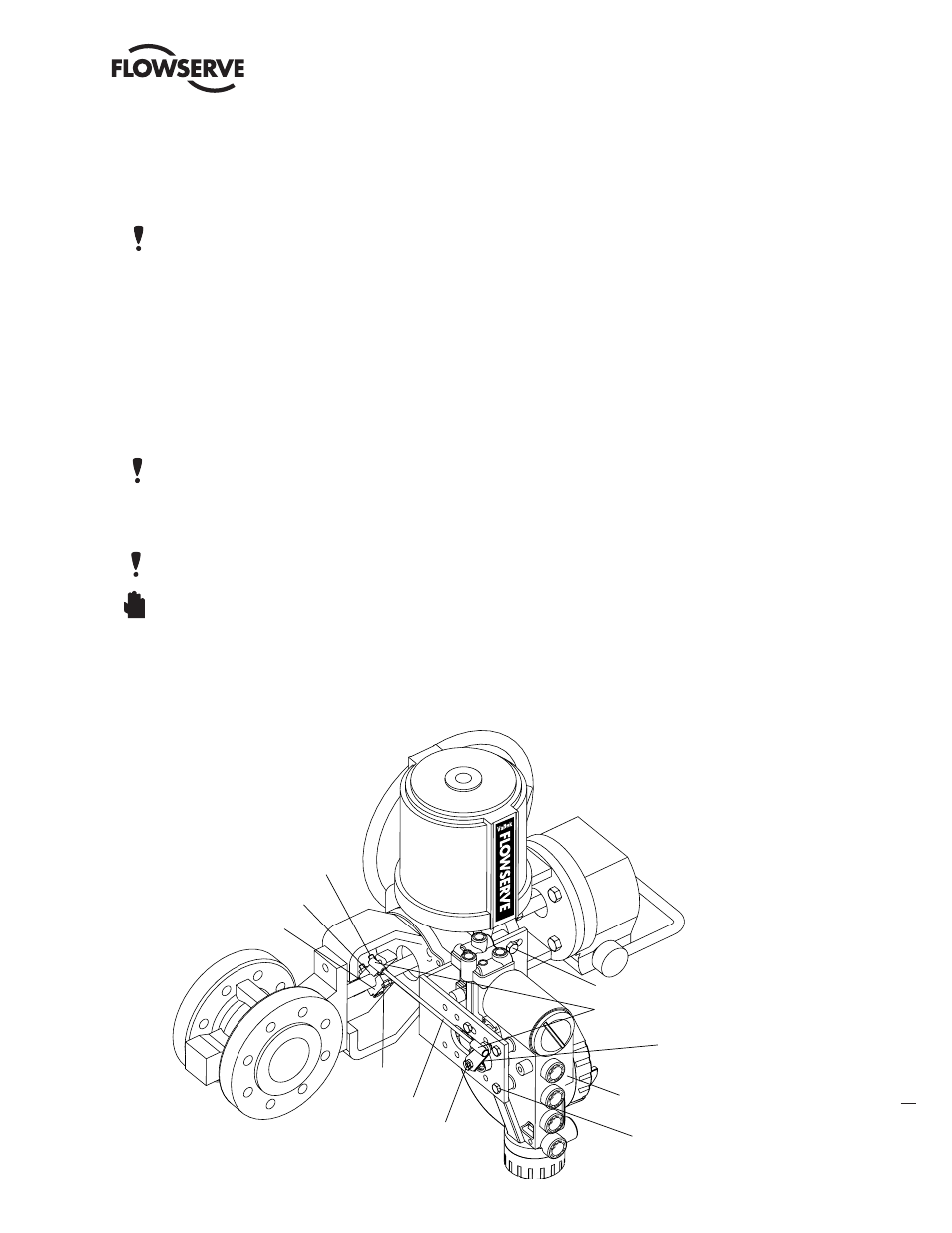
8.3 Optional Flowserve Valtek Rotary Mounting Procedure
Figure 4: Optional Rotary Mounting (Sensor Mounting not shown)
STOP!
Bracket Bolts 5/16-18 (2)
Ball Joint Ends
Follower Arm
Rotate Positioner 90 Degrees
Mounting Bolts 1/4-20 (4)
Locknuts (2)
Tripper
Tripper Clamp
Bolts (2)
Tie Rod*
10-32 Nut
Lock Washer
* Tie Rod must be cut to desired length