Gk013 p12_13, Why and how? secrets of co-bot, Co-bot's getting up action – Elenco Tumbling Robot User Manual
Page 7: Fall, get up and fall again, Complete guide
FALL, GET UP AND FALL AGAIN
WHY AND HOW?
SECRETS OF
CO-BOT
COMPLETE GUIDE!!
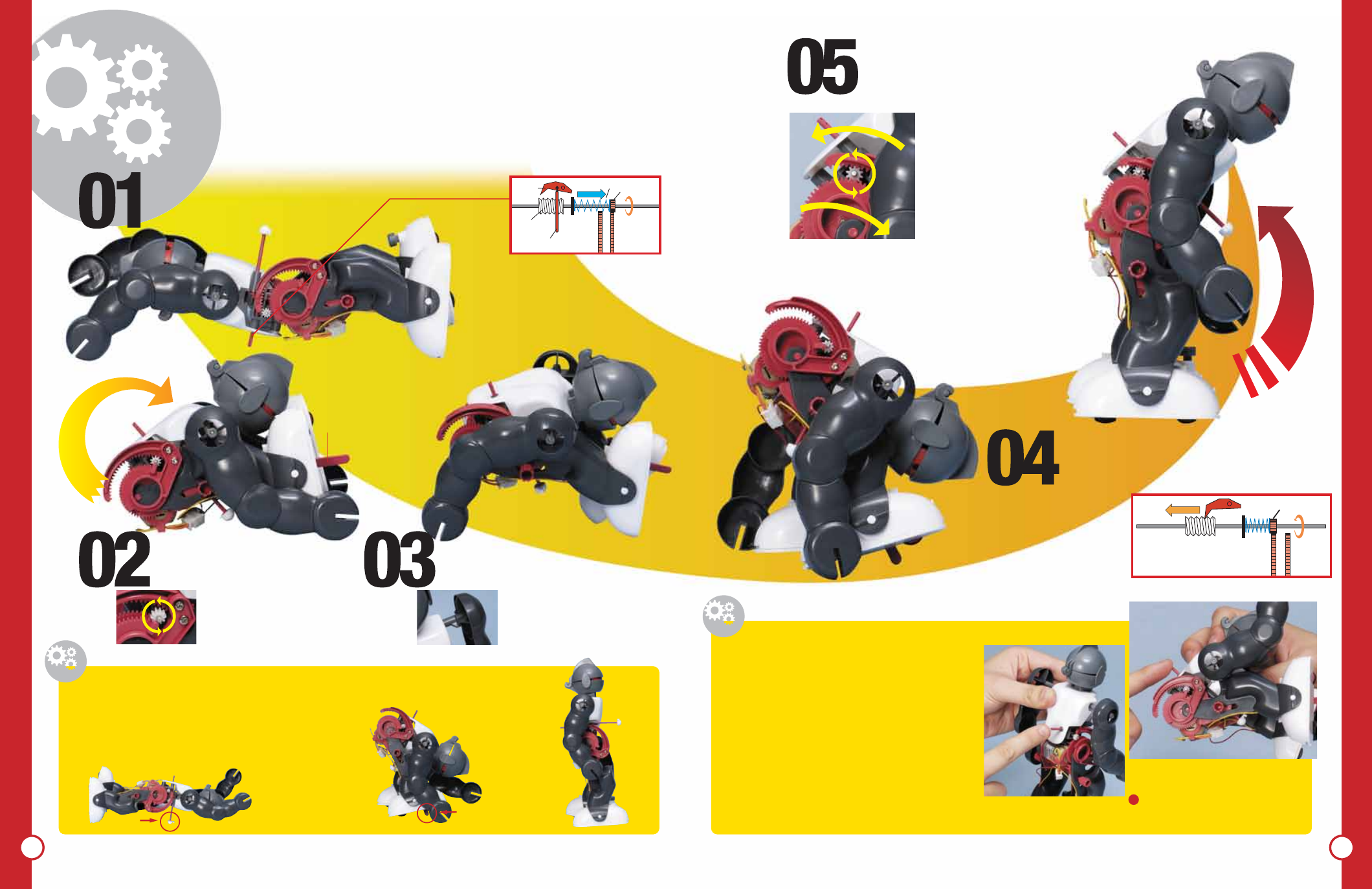
CO-BOT'S GETTING
UP ACTION
How does Co-Bot get up? Let's look at the motion step by step!
GETTING UP ACTION
COMPLETE!!
THE LEG SENSOR
TOUCHES THE GROUND!
As the body gets up, Gear
D engages Gear B (middle
gear) and A (inner gear).
When the body stretches
all the way, gear D leaves
gear B and moves only
gear A. Co-Bot will
continue walking.
The Leg sensor pushes the
needle on the worm.
Because the threads of the
worm run diagonal like a
screw, it slides the axis
toward left side of the hip.
When Co-Bot sits up,
the body pushes the
leg sensor. The leg
sensor extends
beyond the legs.
When Gear D engages Gear C,
The upper body of Co-Bot lifts
up. When upper body bend
forward all the way, Gear D
starts idling. It remains idling
until the body starts stretching.
The arm axis rotates. A fin on
the axis meets the fin on the
shoulder and pushes the arms
around.
*Gear B is omitted
When the back sensor gets
pressed, the needle is lifted
and disengaged from the
worm. The spring on the axis
extends and bring Gear D to
Gear C. Co-Bot is switched to
getting up mode.
FALLS BACKWARD!
CO-BOT SITS UP!
PUSH UP THE BODY
WITH ARMS!
Co-Bot doesn’t have abilities to see things or
make decisions. Co-Bot relies on sensors to
maneuver and switch between the different
motions. Let's check the function of a sensor by
moving the sensor by hand.
•
Pick up the walking Co-Bot
and push the back sensor…
•
The body bends in half even
though Co-Bot didn't fall down!!
Be careful not to drop Co-Bot
When Co-Bot falls forward, the belly sensor is pushed by the
ground and the body bends in half. The leg sensor
immediately touches the ground and bring the body upright.
It is much quicker motion than getting up by the arms.
Like a screw, rotation
causes the axis to slide in
the direction of the arrow.
Needle
Spring
Gear A
Gear C
Gear D
Worm
Back Sensor
•
First, the belly sensor gets pushed in.
•
The moment the
body folds in half, the
leg sensor touches
the ground.
•
Instantly, the
body jumps
back up!!
Gear A
Gear C
Gear D
WHEN FALLS DOWN ON BELLY, CO-BOT JUMPS
UP SWIFTLY!!
LET'S CHECK THE FUNCTION
OF A SENSOR!
!
12
13
JR. SCIENTIS
T
TUMBLING ROBO
T