Gk013 p10_11, Why and how? secrets of co-bot, Fall, get up and fall again – Elenco Tumbling Robot User Manual
Page 6: Creating complex actions the secret of the gears
FALL, GET UP AND FALL AGAIN
WHY AND HOW?
SECRETS OF
CO-BOT
CHANGING INTERNAL GEARS
THE SECRET OF THE 3
SENSORS
TRANSFERRING ROTATIONAL MOTION
OF MOTOR TO LINEAR MOTION OF WALK
THE SECRET OF THE CRANK
Co-Bot can walk! No matter how many falls and
stumbles, Co-Bot gets up without any help! How does
Co-Bot maneuver these complex motions? The secret is
in its original mechanism.
All the great functions of Co-Bot, such as walking and
getting up, becomes useful only when those functions are
activated at the right moment. The 3 sensors at the belly,
the back, and the leg of Co-Bot make it possible. Sensors
are pushed by falling and getting up and change the
internal gears.
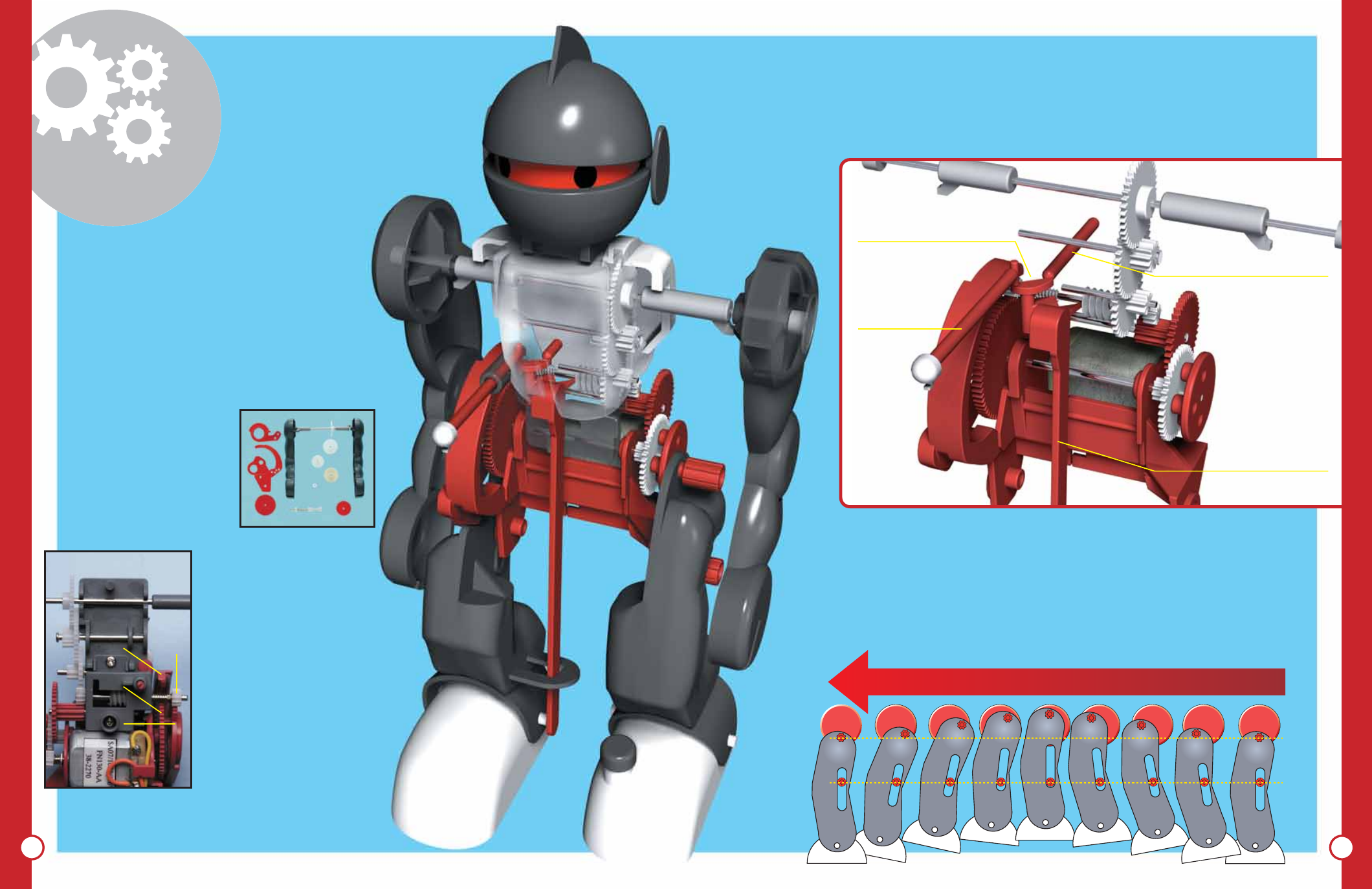
The end of Co-Bot's leg is pinned to the hip gear. Since it is not glued on, the leg can move freely as
the gear rotates. Co-Bot's leg will lift off the ground and steps forward just like humans and other
animals. This becomes possible because the elongated leg slit limits the motion of the legs within a
certain range. This mechanism, transferring a rotational motion into a linear motion, is called a crank.
Co-Bot uses total of 12 gears.
The most important one is the
red gear at the right hip.
"Kagaku no Tamago" original
design, this gear creates
dynamic stand up action.
Gear A (see the right page for detail)
works as a crank that command the leg
motion. Gear C makes Co-Bot bend down
and Gear B stretches the body. A small
Gear D will transfer rotational power of
the motor to the other gears. Depending
on which gear is powered, Co-Bot moves
differently.
• 12 GEARS IN ONE CO-BOT!!
* Colors of the photographed parts may be different
from the actual product.
• HIP GEARS ACTIVATE
DIFFERENT MOTIONS
CREATING COMPLEX ACTIONS
THE SECRET OF THE GEARS
Gear B
Gear D
Gear A
Gear C
This part and the screw like
gear (the worm) work together
and shift one motion to another.
The back sensor: Pushed in
when Co-Bot falls on its back.
The leg sensor: Does
not touch the ground
normally. Activated
during Co-Bot's
getting up rotation,
as the sensor extends
beyond Co-Bot's legs
by falling down.
The belly sensor:
Pushed in when
Co-Bot falls
down on its
belly and hit the
ground.
10
11
JR. SCIENTIS
T
TUMBLING ROBO
T