N2 points, 4mch n2 points, 1 metasys n2 point map – Lenze MCH Series Drives Metasys N2 User Manual
Page 9: Rg-mhmet 6
RG-MHMET
6
N2 Points
4
MCH N2 Points
The MCH N2 Points are divided into four types: analog input, binary input, analog output and binary output.
Sections 4.2 through 4.5 describe each of these point types and the individual point numbers within each.
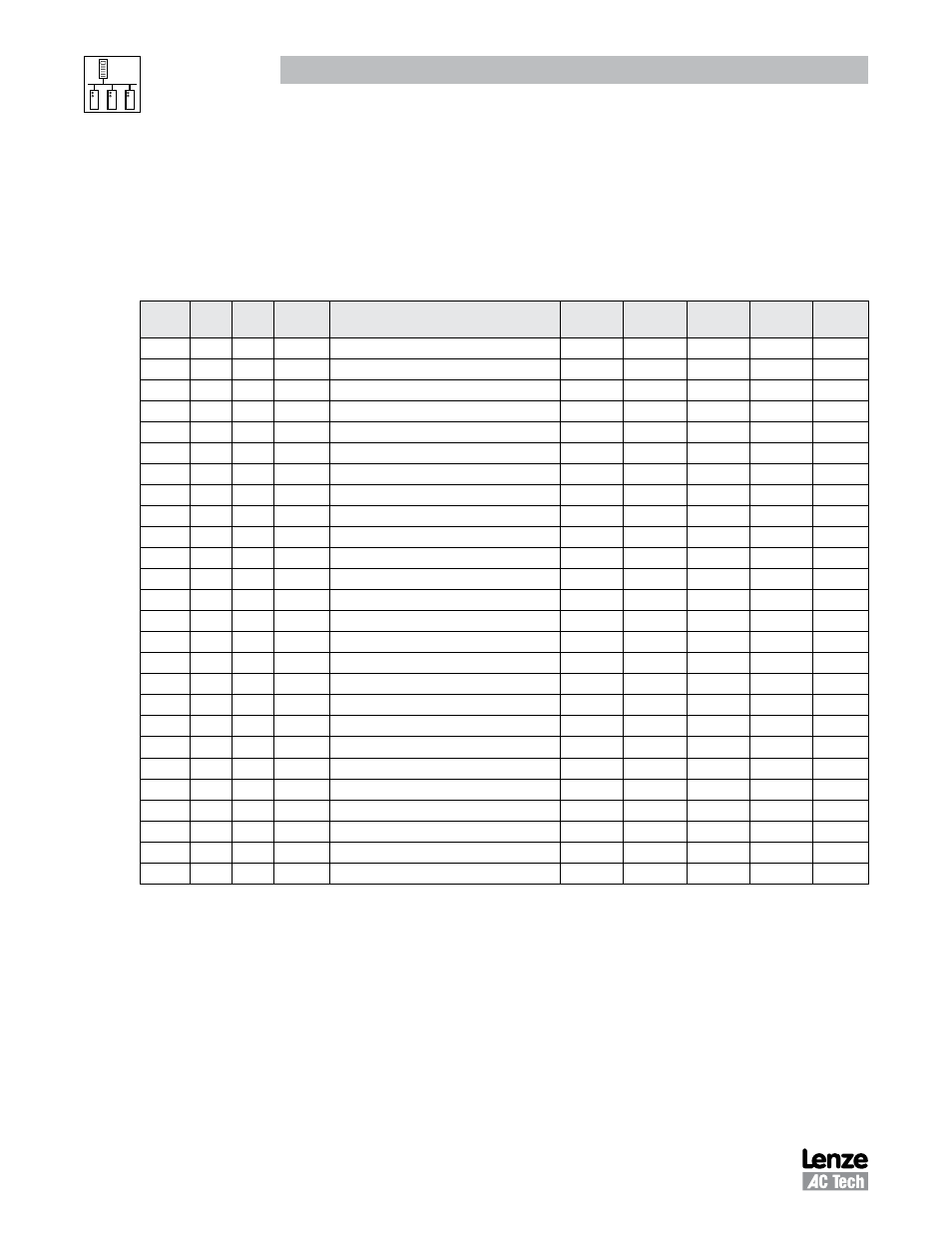
4.1 Metasys N2 Point Map
Table 2: Metasys N2 Point Map for MCH Series Drives
Point
Type
1
Point
#
COS
2
Status
Point
3
Description (Point Name)
Point
Units
Decimal
Places
MIN
Value
MAX
Value
Default
Value
1
01
Yes
Yes
Actual Frequency (OUTPUT FREQ)
HZ
2
0
12000
0
1
02
Yes
Yes
Command Frequency (COMMAND FREQ)
HZ
2
0
12000
2000
1
03
Yes
Yes
Load Percent (LOAD PERCENT)
PCT
0
0
255
0
1
04
Yes
Yes
Total Runtime (RUNTIME HRS)
HRS
0
0
65535
0
1
05
Yes
Yes
DC Bus Voltage (DC BUS VOLTS)
PCT
0
0
255
0
1
06
Yes
Yes
Operational Status (RUN STATUS)
--
0
0
10
3
1
07
Yes
Yes
H/O/A Mode (HOA MODE)
--
0
0
2
0
1
08
Yes
Yes
PID Setpoint Command (PID SETPOINT)
Note 4
0
Note 4
Note 4
50
1
09
Yes
Yes
PID Feedback (PID FEEDBACK)
Note 4
0
Note 4
Note 4
0
1
10
Yes
Yes
Present Fault (FAULT)
--
0
0
24
0
2
01
Yes
Yes
PID Mode (PID MODE)
--
--
DIS
ENA
DIS
2
02
Yes
Yes
Current Direction (FWD.REV)
--
--
FWD
REV
FWD
2
03
Yes
Yes
Run/Stop Status (RUN.STOP)
--
--
STP
RUN
STP
2
04
Yes
Yes
TB-14 / Relay #2 (TB14.RELAY2)
--
--
OFF
ON
OFF
2
05
Yes
Yes
TB-15 / Relay #3 (TB15.RELAY3)
--
--
OFF
ON
OFF
2
06
Yes
Yes
Relay #1 (RELAY1)
--
--
OFF
ON
OFF
2
07
Yes
Yes
Fault Condition (OK.FAULT)
--
--
OK
FLT
OK
2
08
Yes
Yes
Serial Watchdog (SERIAL WATCHDOG)
--
--
ENA
DIS
ENA
3
01
Yes
No
Acceleration Rate (ACCEL RATE)
SEC
1
0
36000
300
3
02
Yes
No
Deceleration Rate (DECEL RATE)
SEC
1
0
36000
300
3
03
Yes
No
Speed Source Selection (SOURCE SEL)
--
0
0
2
0
3
04
Yes
No
Keypad Speed Command (KEY SPD CMD)
HZ
2
0
12000
2000
3
05
Yes
No
Keypad Setpoint Command (KEY STPT CMD)
Note 4
0
Note 4
Note 4
50
4
01
Yes
No
Start/Stop Drive (CMD RUN.STOP)
--
--
STP
RUN
STP
4
02
Yes
No
Disable Serial Watchdog (DIS SER WATCHDOG)
--
--
NRM
DIS
NRM
4
03
Yes
No
Clear Present Fault (CLEAR FAULT)
--
--
NRM
RST
NRM
NOTES:
1. Point Types: 1= AI (Analog Input); 2 = BI (Binary Input); 3 = AO (Analog Output); 4 = BO (Binary Output)
2. COS: Change of State
3. Status Points: for monitoring purposes only and cannot be overridden; Yes = Point can be used as a
status point; No = Point cannot be used as a status point.
4. Units, MIN/MAX Values: for this point are defined via Drive Parameters #31, 75 and 76 respectively.
Refer to notes in sections 4.2 and 4.4.