AMETEK 1995A Micro-Set PLS User Manual
Page 19
15
Installation and Maintenance Manual
Chapter 3: Programming
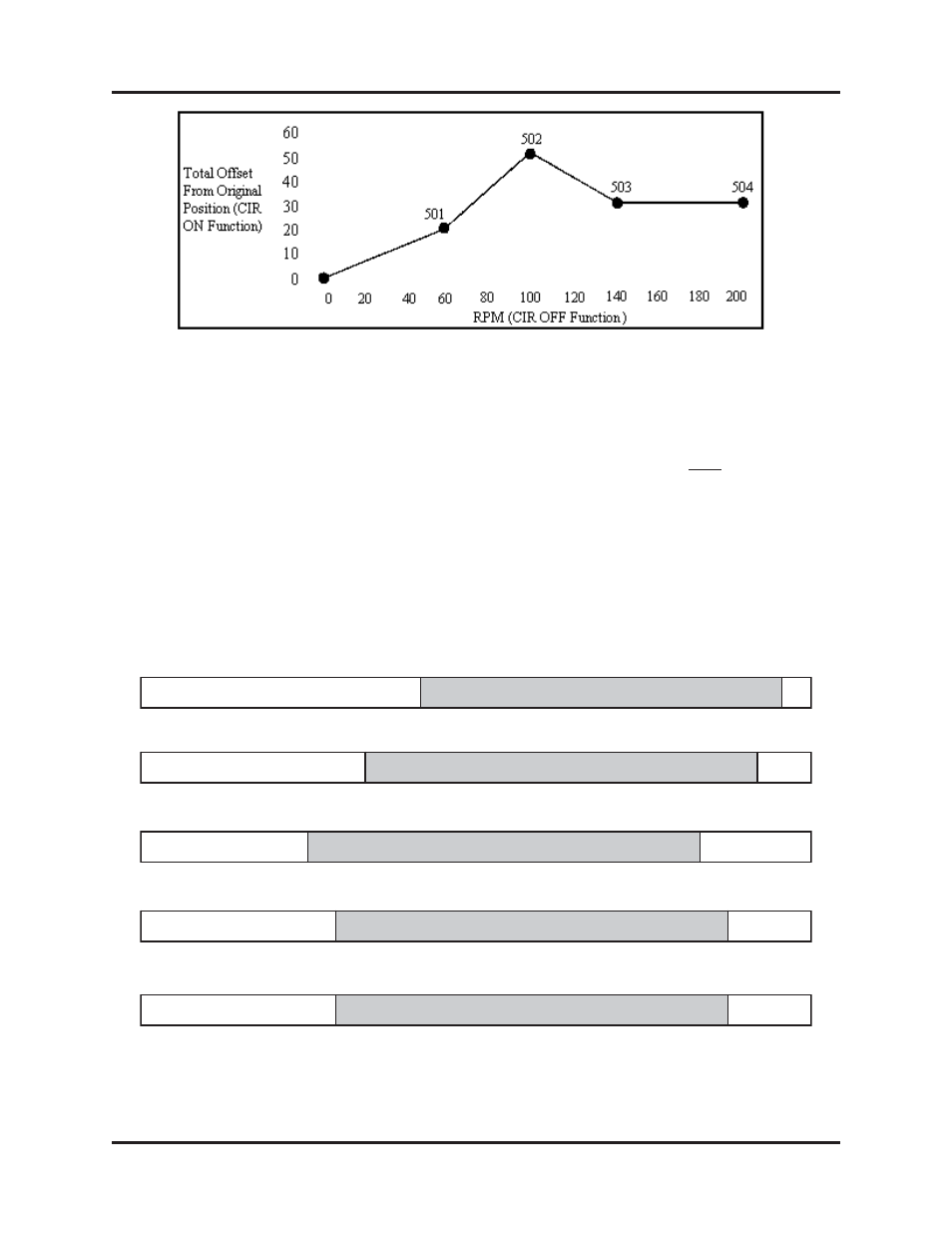
The graph above shows an example of four steps of linear offset in which the output circuits are being
advanced in the first two steps, retarded between the second and third, and remaining unchanged
between the third and fourth. The first step (501) is programmed to linearly advance the selected
outputs by 20 degrees between 0 and 60 RPM. Circuits originally programmed to turn on at 150
degrees and off at 350 degrees will be turning on at 130 degrees and off at 330 degrees while at 60
RPM. The second step (502) is programmed to advance these same outputs to a total of 50 degrees
as RPM rises between 60 and 100 RPM. The example circuit mentioned above that was originally
programmed to turn on at 150 degrees and off at 350 degrees will now be turning on at 100 degrees
and off at 300 degrees while at 100 RPM. The third step (503) is programmed to retard the circuits
back to a total of 30 degrees as RPM continues to rise from 100 to 140 RPM. The example circuit,
originally programmed to turn on at 150 degrees and off at 350 degrees is now turning on at 120
degrees and off at 320 degrees while running at 140 RPM. The fourth step (504) is programmed to
maintain a fixed 30 degrees of total offset between 140 and 200 RPM.
NORMAL PLS DWELL
0
150
350 359
1ST COMPENSATION AT 60 RPM
0
130
359
330
2ND COMPENSATION AT 100 RPM
0
100
300
359
3RD COMPENSATION AT 140 RPM
0
120
320
359
4TH COMPENSATION AT 200 RPM
0
120
320
359
The offset (advance or retard) is applied linearly between each step, and the offset follows the same
curve as RPM decreases. Example: At 80 RPM, offset value would be 35°.