LEESON SM Series Sub-Micro Inverters User Manual
Page 43
39
P30
SLIP COMPENSATION
SLIP COMPENSATION is used to counteract changes in motor speed (slip) caused by changes in load.
In a standard AC induction motor, the shaft speed decreases as load increases, and increases as load
decreases. By increasing or decreasing the output frequency in response to an increasing or decreasing
load, the slip is counteracted and speed is maintained. Most standard NEMA B motors have a 3% slip
rating.
P31 - P37 PRESET SPEED #1 - #7
Preset speeds are activated by contact closures between TB-11 and TB-13A, 13B, and 13E. The TB-13
terminals must be programmed as preset speed selects using Parameters 10-12.
NOTE 1: Preset speeds can operate below the frequency defined by the Minimum Frequency
parameter (Parameter 23).
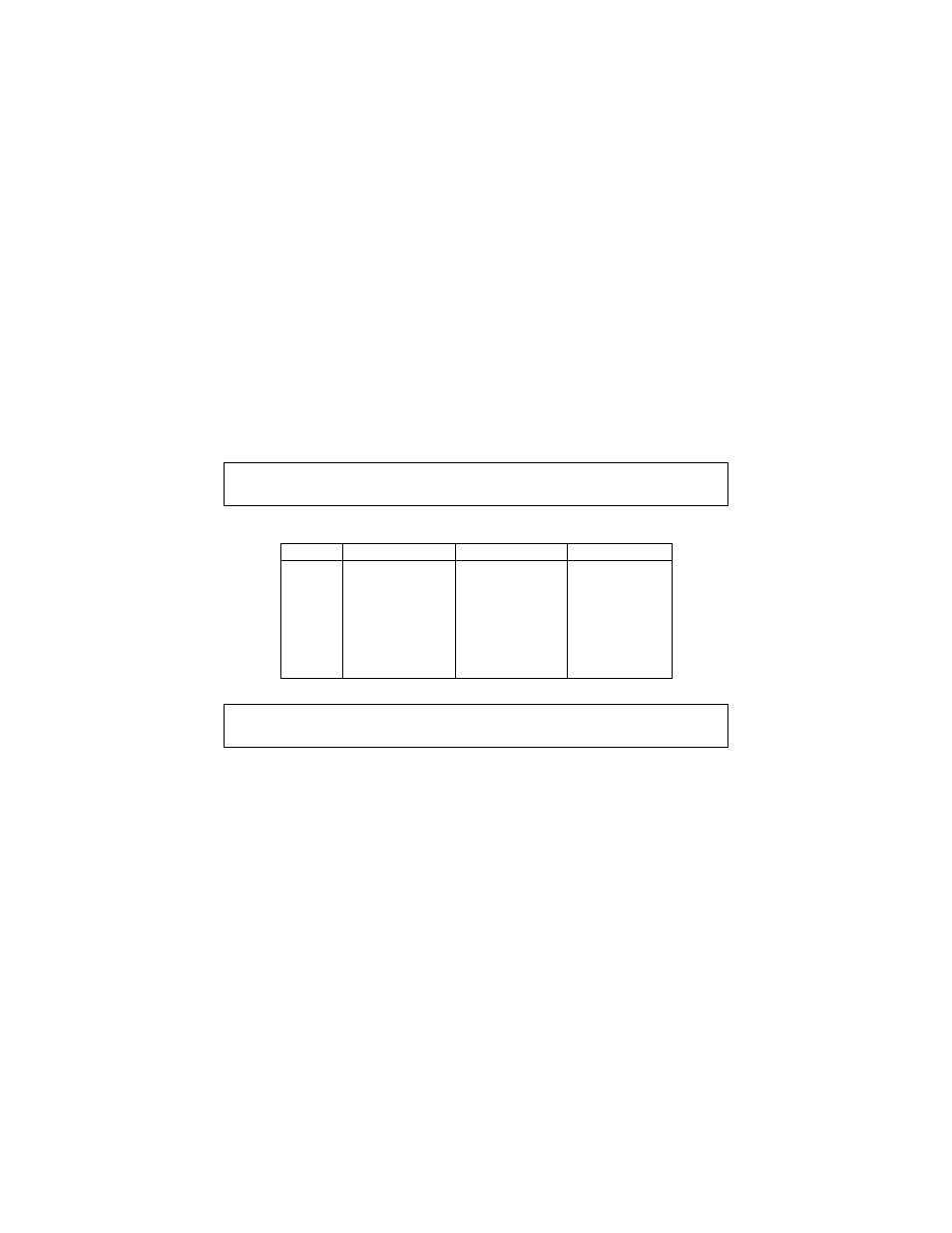
Refer to the table below for activation of the preset speeds using the TB-13 terminals.
NOTE 2: When a TB-13 terminal is programmed for a function other than a preset speed select, it
is considered OPEN for the table above.
Preset Speed #6 and #7 can also be used as skip frequencies to restrict the drive from operating at
frequencies that cause vibration in the system. See Parameter 38 below.
P38
SKIP BANDWIDTH
The SM Series
™
drive has two skip frequencies that can be used to lock out critical frequencies that cause
mechanical resonance in the system. Once SKIP BANDWIDTH is set to a value other than 0 Hz, the
skip frequencies are enabled. When the skip frequency function is enabled, PRESET SPEED #6 and #7
are used as the skip frequencies. SKIP BANDWIDTH sets the range above the skip frequencies that the
drive will not operate within.
SPEED #
TB-13A
TB-13B
TB-13C
1
CLOSED
OPEN
OPEN
2
OPEN
CLOSED
OPEN
3
OPEN
OPEN
CLOSED
4
CLOSED
CLOSED
OPEN
5
CLOSED
OPEN
CLOSED
6
OPEN
CLOSED
CLOSED
7
CLOSED
CLOSED
CLOSED