4 g 3 g 1 g 6 g – CEMB USA C72 (B) User Manual
Page 19
I 0307_0308 -
19
12/13 mm
sx
g
g
dx
50
sx
g
g
dx
4 g
3 g
1 g
6 g
sx
g
g
dx
sx
g
g
dx
sx
g
g
dx
GB
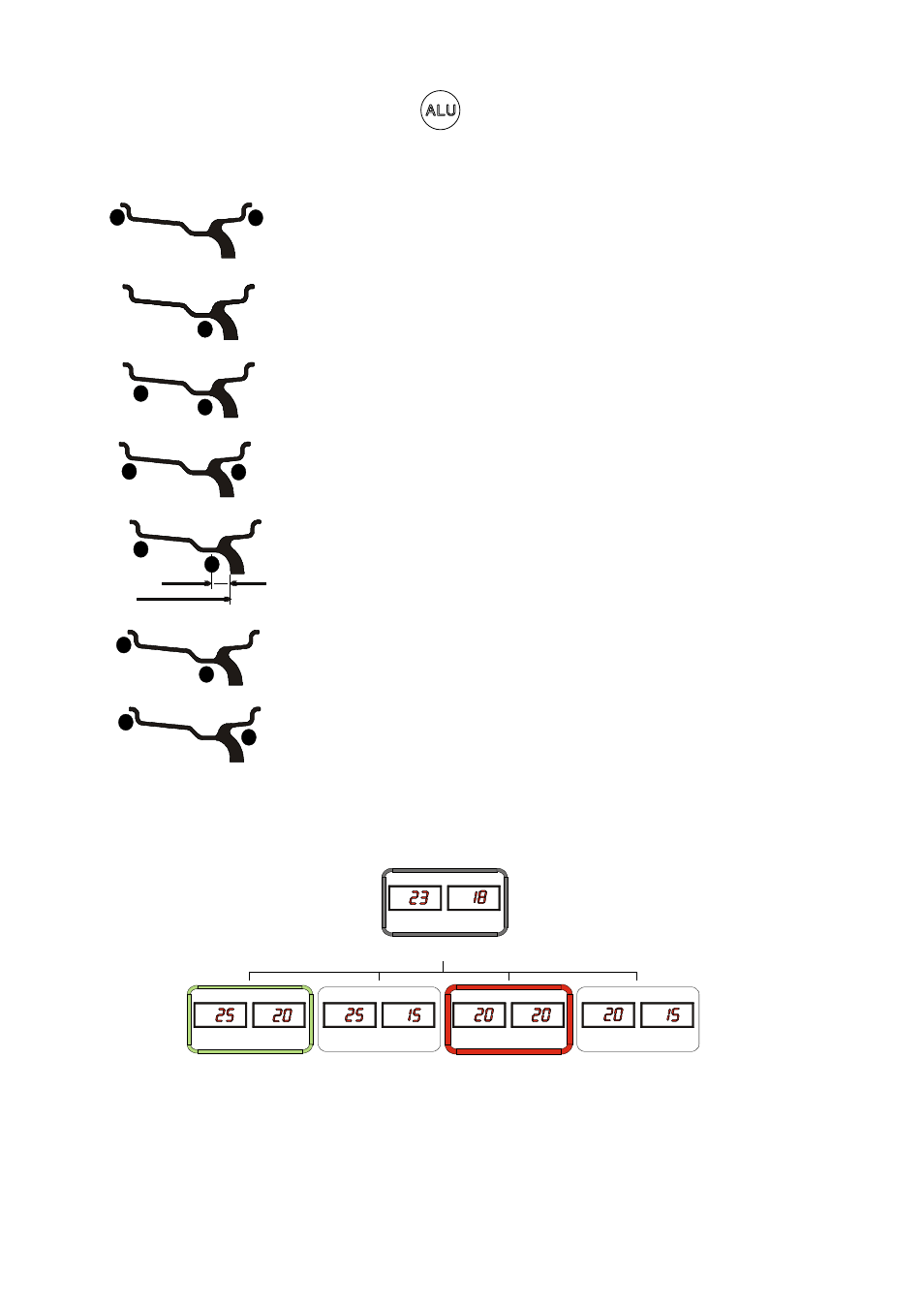
5.4.4 - ALU AND STATIC MODES
From the Measurement screen, press button
to select the type required. The 5-LED displays show
the position where to apply the weights. If a spin has already been performed, the processor automatically
recalculates, for each change of mode, the amounts of unbalance according to the new calculation.
Fig. 19
DYNAMIC
Balancing steel or light alloy wheel rims by
applying clamp weights on the edge of the wheel rim.
STATICO
The static mode is necessary for motorcycle wheels or
when it is not possible to place the counterweights on
both
sides
of
the
rim.
ALU - S
Balancing of light alloy rims with application of adhesive
weights in positions inside the rim (user settable).
ALU - 1
Balancing of light alloy rims with application of adhesive
weights
on
the
rim
shoulders.
ALU - 2
Balancing of light alloy rims with hidden application of
the outer adhesive weight. Outer weight position is fi xed.
ALU - 3
Combined application: clip-on weight inside and hidden
adhesive weight on outside (Mercedes). Outer weight
position
is
the
same
as
ALU-2.
ALU - 4
Combined application: adhesive weight outside and
clip-on
weight
inside.
5.4.5 - AUTOMATIC MINIMIZATION OF STATIC UNBALANCE
resting surface
This program is designed to improve the quality of balancing without any mental effort or loss of time by the ope-
rator. In fact by using the normal commercially available weights, with pitch of 5 in every 5 g, and by applying the
two counterweights which a conventional wheel balancer rounds to the nearest value, there could be a residual
static unbalance of up to 4 g. The damage of such approximation is emphasized by the fact that static unbalance is
cause of most of disturbances on the vehicle. This new function, resident in the machine, automatically indicates the
optimum entity of the weights to be applied by approximating them in an “intelligent” way according to their position
in order to minimize residual static unbalance.
Initial unbalance
phase shift
Possible approximations
residual static
residual static
residual static
residual static
With conventional
wheel balancer
Choice with minimum
static residual