Technological description, 1 purpose, 2 technical specifications – CEMB USA K10 User Manual User Manual
Page 5: 3 dimensions and weights
5
STATIC
oz
g
oz
STOP
START
ENTER
STATIC
oz
g
oz
STOP
START
ENTER
2
3
4
1
4
K10 EVO - Use and maintenance manual Rev. 04-2009
ENGLISH
Technological description
2.1
PURPOSE
K10 EVO is used to balance the wheels of cars, vans,
4-WD, motorcycles and scooters.
It features excellent performance in a compact space, a
solid structure and a cutting-edge design.
It has elevated precision at low balancing speeds and is
easy to use.
It does not need to be fixed to the floor and does not require
wheel guards. The balancer can work without guards as
the balancing speed is 100 rpm.
Thanks to the new and exclusive VDD (Virtual Direct Drive
-CEMB patent) system, reliable unbalance measurements
can be made in a short time, almost half the time of the cycle
used with respect to other balancers in this range.
The main features include:
direct selection of the metrical or Anglo-Saxon system
▪
machine settings menu.
▪
optimisation of tyre and rim unbalance.
▪
static programme, ALU / ALU “S” / SPLIT.
▪
automatic minimisation of static unbalance.
▪
2.2 TECHNICAL
SPECIFICATIONS
The following data refers to the balancer in its standard
configuration.
Single phase power supply
115 or 230 V 50-60 Hz (see rating plate)
Protection class
IP 54
Max absorbed power
0.8 Kw
Cycle time per wheel
4.7 seconds (5 3/4"x14") 15 Kg.
Balancing speed
100 min
-1
Balancing accuracy
1 gram
Position resolution
± 1.4 °
Average noise
< 70 dB(A)
Rim width settable
1.5" ÷ 20" or 40 ÷ 510 mm
Settable diameter
10" ÷ 30" or 265 ÷ 765 mm
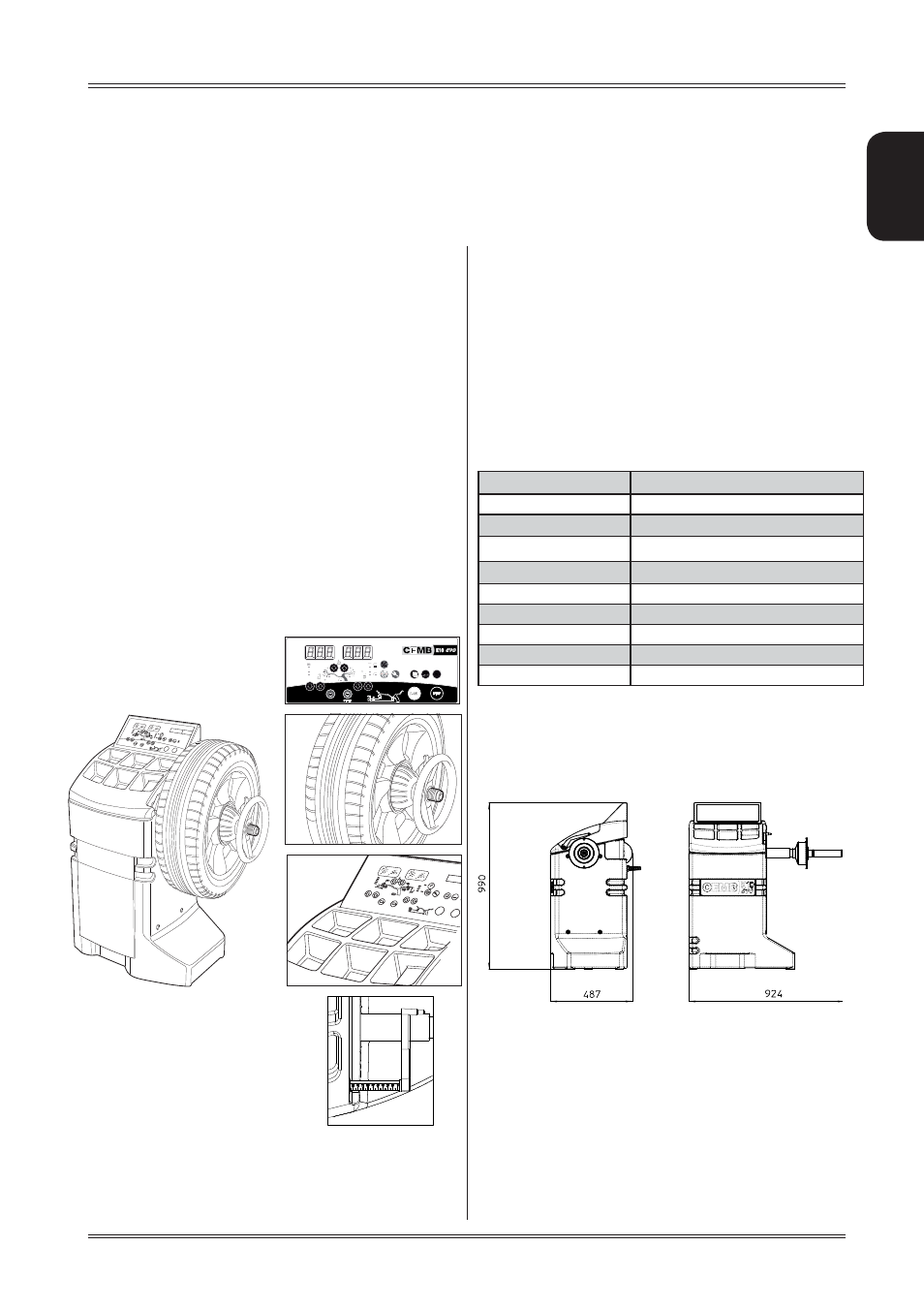
2.3
DIMENSIONS AND WEIGHTS
The machine complete with flange weighs 110 kg.
2. Technological description
CONTROL PANEL
1.
LOCK NUT
2.
WEIGHT-TOOL HOLDER
3.
MANUAL GAUGE
4.