7 opposite position, 8 automatic minimization of static unbalance, English – CEMB USA C212 User Manual User Manual
Page 11
11
sx
g
g
dx
50°
sx
g
g
dx
4 g
3 g
1 g
6 g
sx
g
g
dx
sx
g
g
dx
sx
g
g
dx
1
2
1
2
1
2
1
2
1
2
Use and maintenance manual Rev. 10-2010
ENGLISH
b. Move one of the spokes to 12 o’clock (e.g.: 1) and
press
c. Following the direction of rotation indicated by the
position LED’s, move spoke 2 to12 o’clock and press
. The value to use for correction in position 2
is displayed.
d. Move spoke 1 to the correction position as indicated
by the position LED’s
When the OPPOSITE POSITION function is enabled (see
relative paragraph) the correction position at 6 o’clock is
also indicated, so that the operator can easily insert the
correction weight by pressing it downward.
To return to the normal unbalance indication press any
button.
INfoRmATIoN
The distance between the spokes must be at least 18°
and at most 120° (if not, the errors 24,25 or 26 appear).
Spokes with irregular or inconstant angles can be
compensated.
5.7
OPPOSITE POSITION
The normal balancing condition requires the correction
weight to be applied at the top (12 o’clock) when the
symbol is displayed:
If OPPOSITE POSITION is enabled, the eventual appli-
cation position for the bottom weight is also indicated
next to the positioning arrows to facilitate cleaning the
rim and the relative application of adhesive weights. The
symbol used is:
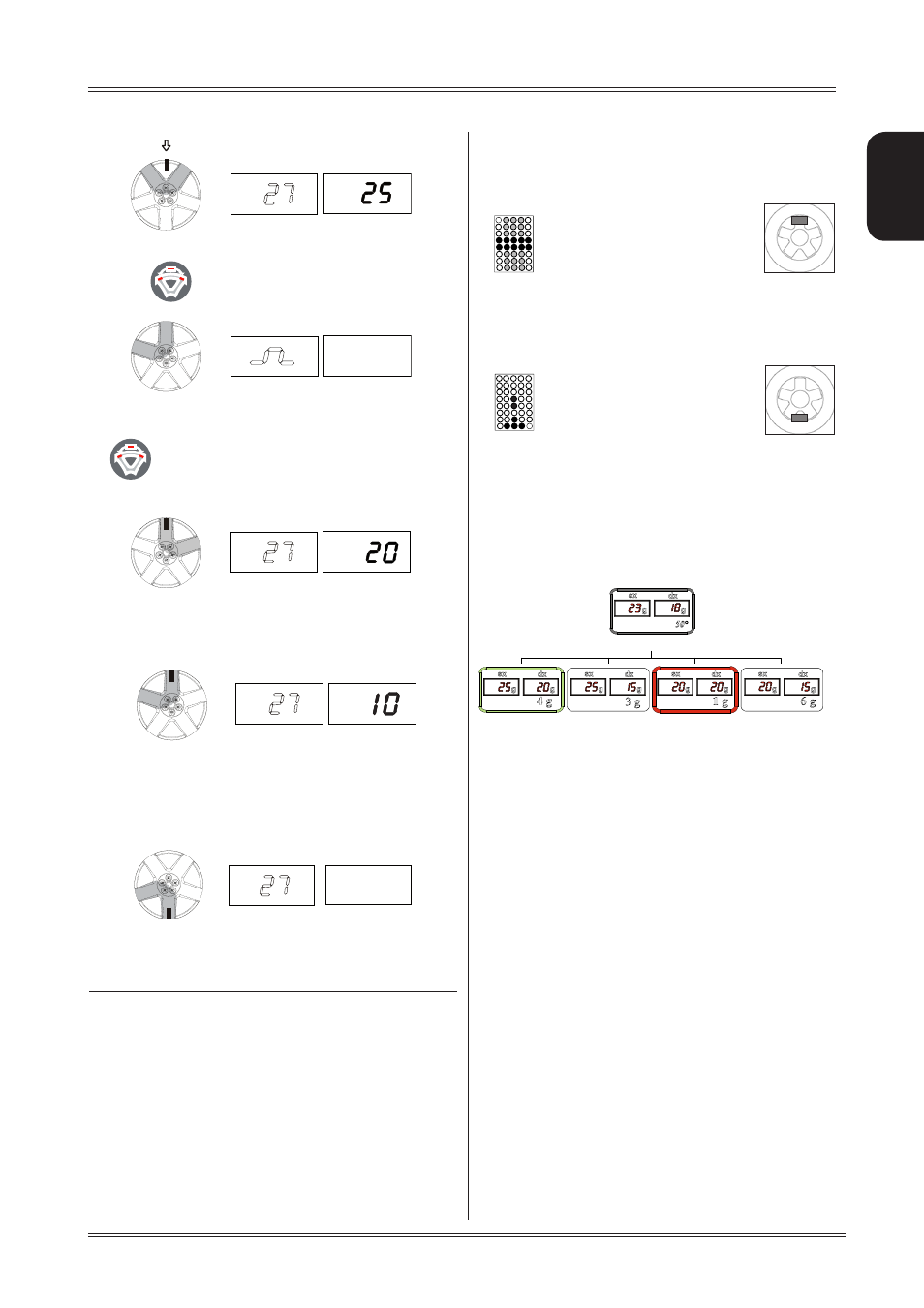
5.8 AUTOMATIC MINIMIZATION OF STATIC
UNBALANCE
This program is designed to improve the quality of balancing
without any mental effort or loss of time by the operator. In
fact by using the normal commercially available weights, with
pitch of 5 in every 5 g, and by applying the two counterweights
which a conventional wheel balancer rounds to the nearest
value, there could be a residual static unbalance of up to 4
g. The damage of such approximation is emphasized by the
fact that static unbalance is cause of most of disturbances
on the vehicle. This new function, resident in the machine,
automatically indicates the optimum entity of the weights
to be applied by approximating them in an “intelligent” way
according to their position in order to minimize residual static
unbalance.
Use of the wheel balancer
Initial unbalance
Phase shift
Possible approximations
static residue
static residue
static residue
static residue
With traditional wheel
balancer
Choice with minimum static
unbalance