Command control curves – RoboteQ Dual Channel Digital Motor Controller AX500 User Manual
Page 89
AX500 Motor Controller User’s Manual
89
Command Control Curves
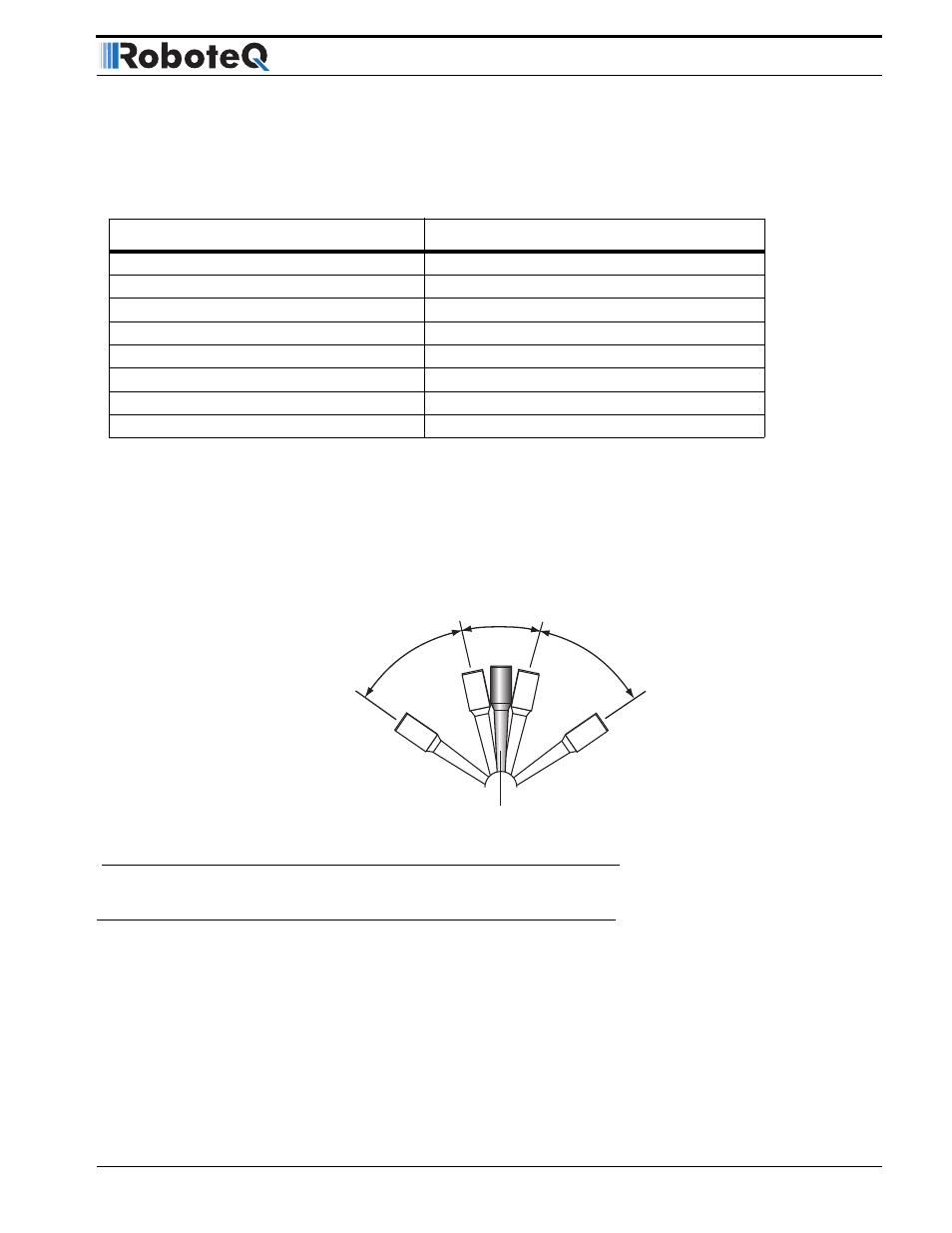
The deadband is measured as a percentage of total normal joystick travel. For example, a
16% deadband means that the first 16% of joystick motion in either direction will have no
effect on the motors.
Note that the deadband only affects the start position at which the joystick begins to take
effect. The motor will still reach 100% when the joystick is at its full position. An exagger-
ated illustration of the effect of the deadband on the joystick action is shown in the
Figure 58 below.
Command Control Curves
The AX500 can also be set to translate the joystick motor commands so that the motors
respond differently depending on whether the joystick is near the center or near the
extremes. Five different exponential or logarithmic translation curves may be applied.
Since this feature applies to the R/C, Analog and RS232 modes, it is described in detail in
“Command Control Curves” on page 42, in the General Operation section of this manual.
TABLE 13. Selectable deadband values
Deadband Parameter Value
Deadband as Percent of full Joystick Travel
d = 0
No deadband
d = 1
8%
d = 2
16% - default value
d = 3
24%
d = 4
32%
d = 5
40%
d = 6
46%
d =7
54%
Centered
Position
Deadband
(no action)
Min
Forward
Min
Reverse
Max
Forward
Max
Reverse
FIGURE 58. Effect of deadband on joystick position vs. motor speed