Dynamixel rx-28 – Robotis RX-28 User Manual
Page 14
DYNAMIXEL
RX-28
Control Table
The Control Table contains information on the status and operation of the Dynamixel
actuator. The Dynamixel actuator is operated by writing values to its control table and its
status is checked by reading values off its control table.
RAM and EEPROM
The data values for the RAM area will be set to the default initial values whenever the
power is turned on. However, the data values for the EEPROM area are non-volatile
and will still remain even after the power is turned off.
Initial Value
The Initial Value column on the right side of the control table shows the Factory Default
Values for the case of EEPROM area data, and shows the initial value when the power
is turned on for the case of RAM area data.
The following explains the meaning of data stored in each of the addresses in the
control table.
Address 0x00,0x01
Model Number. For RX-28, this value is 0X001C (28).
Address 0x02
Firmware Version.
Address 0x03
ID. The unique ID number assigned to each Dynamixel actuators for identifying them.
Different IDs are required for each Dynamixel actuators that are on the same network.
Address 0x04
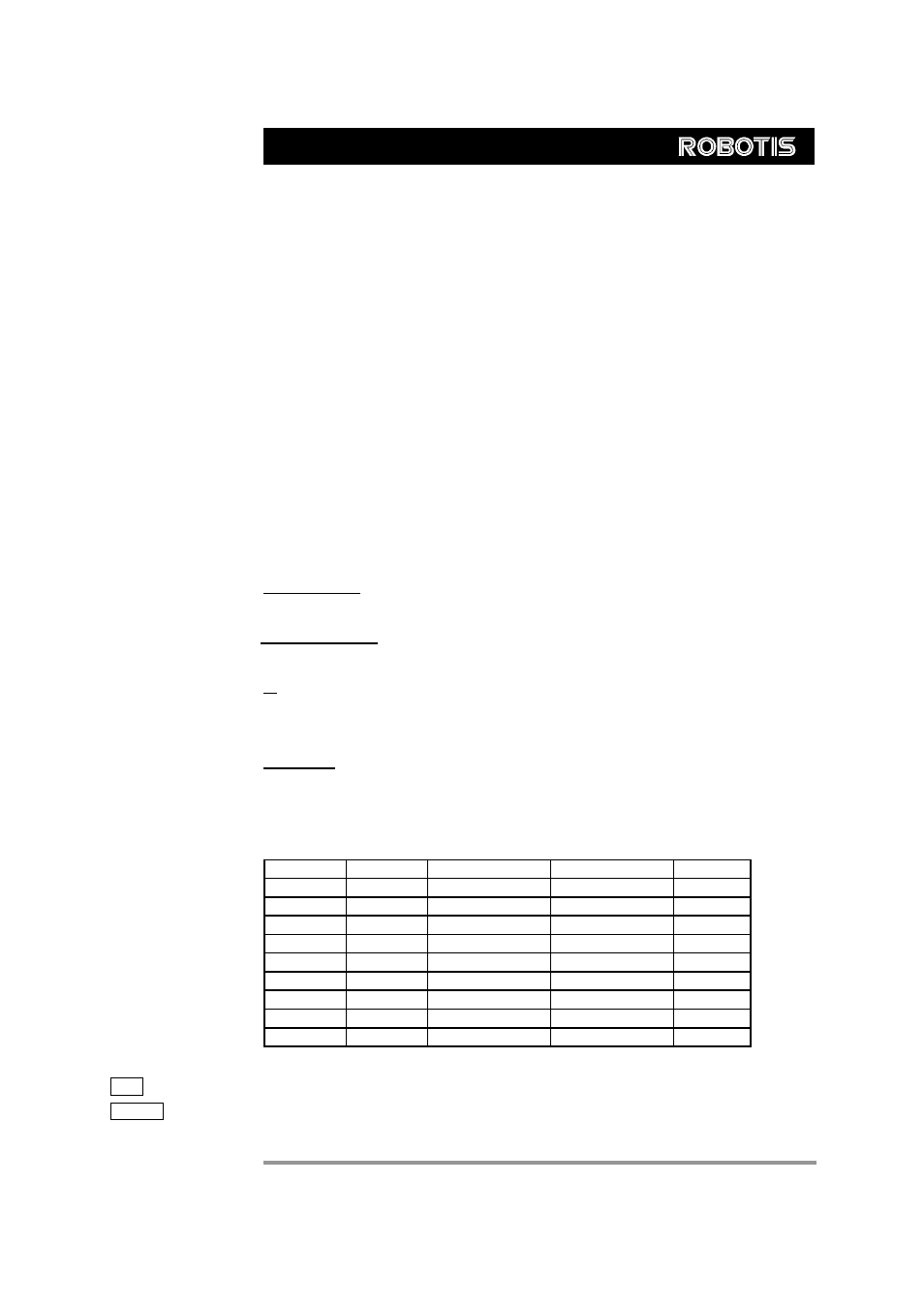
Baud Rate. Determines the communication speed. The computation is done by the
following formula.
Speed (BPS) = 2000000 / (Address4 + 1)
Data Value for each Major Baud Rate
Adress4
Hex
Set BPS
Goal BPS
Error
1
0X01
1000000.0
1000000.0
0.000%
3
0X03
500000.0
500000.0
0.000%
4
0X04
400000.0
400000.0
0.000%
7
0X07
250000.0
250000.0
0.000%
9
0X09
200000.0
200000.0
0.000%
16
0X10
117647.1
115200.0
-2.124%
34
0X22
57142.9
57600.0
0.794%
103
0X67
19230.8
19200.0
-0.160%
207
0XCF
9615.4
9600.0
-0.160%
Note
A maximum Baud Rate error of 3% is within the tolerance of UART communication.
Caution
The initial value of Baudrate is set to 34(57600bps)
13