Navman JUPITER LA000605D User Manual
Page 9
LA000605D © 2007 Navman New Zealand. All rights reserved. Proprietary information and specifications subject to change without notice.
2.3.3 Decoupling components
The recommended values for power and signal decoupling are shown in Table 2-2. The
placement of these components must ensure that the low value capacitors have very short
connections to the module pad and to the ground plane.
Function
Pad
Decoupling
PWRIN
F1
1 µF||10 nF
BOOT
C4
27 pF
RXA
D5
27 pF
TXA
D7
27 pF
TXB
F6
27 pF
RXB
E6
27 pF
RF_ON
A7
27 pF
VANT
A4
1 nF
VCC_RF
F3
1 µF||1 nF
VBATT
F2
10 nF
N_RESET
E5
27 pF
N_GPS_FIX
D4
27 pF
GPIO (ALL)
-
27 pF
WAKEUP
F4
27 pF
LNA_EN
C5
27pF
1PPS
E7
27 pF
Note: ‘||’ represents a parallel connection
Table 2-2: Decoupling recommendations
2.3.4 Antenna connection
The PCB layout design of the antenna input connection requires the appropriate selection of
PCB track width, substrate material and careful attention to the layout geometry. If this overall
system is not implemented correctly, the module will receive poor GPS signals and therefore
provide inferior navigation data.
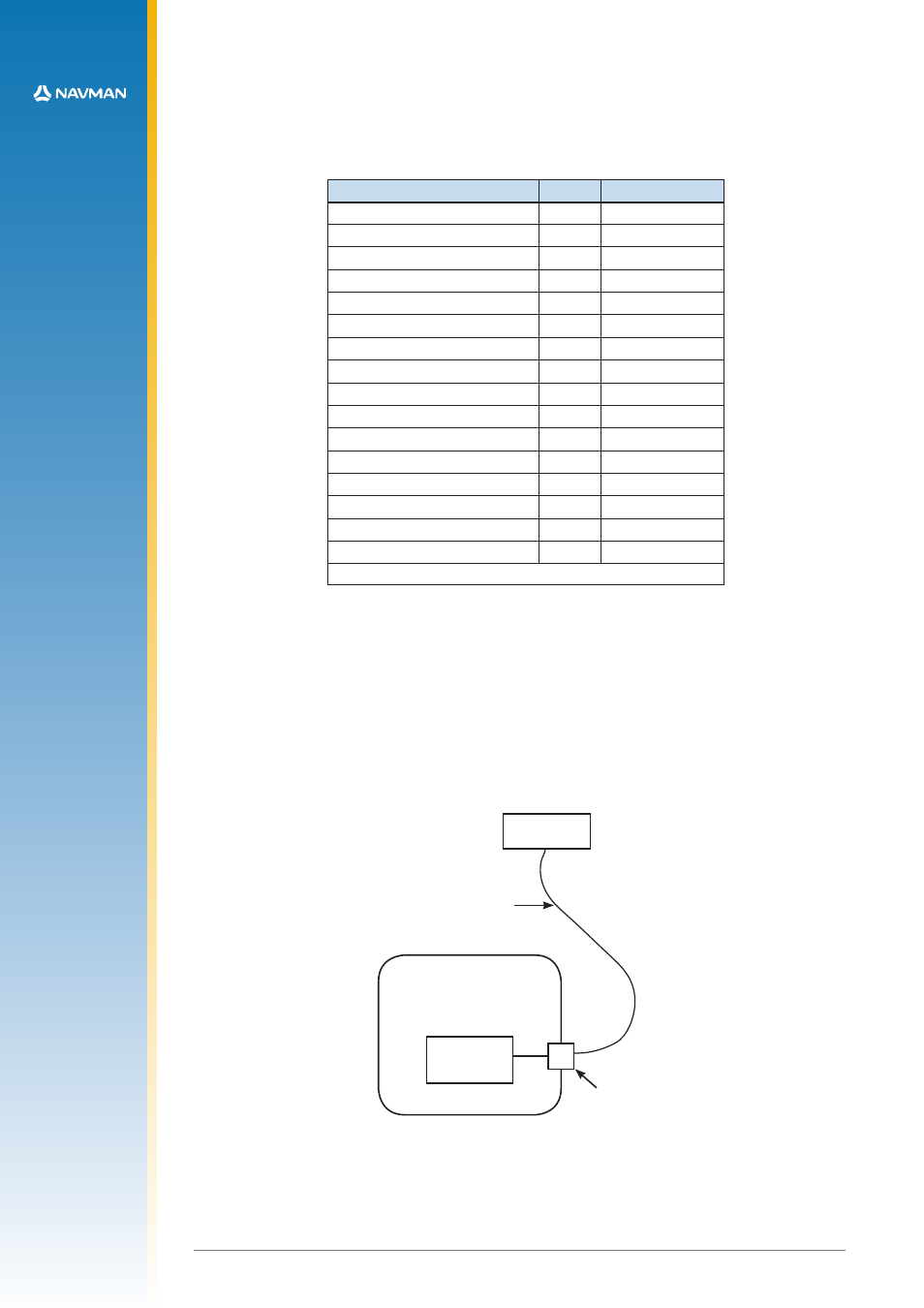
Figure 2-5 shows an example of a PCB design integrating an external active antenna
connected via an MCX or SMA coaxial connector.
Application PCB
Jupiter
module
Active GPS
antenna
connecting coax carrying
GPS signals and DC
power for amplification
coaxial connector
fitted to application
PCB
Figure 2-5: Arrangement of active antenna and application board