6 related drive parameters – Yaskawa Modbus TCP/IP SI-EM3D User Manual
Page 27
<5>
The setting specifies that the Torque Reference or Torque Limit is to be provided via network communications
(F6-06 = 1). The motor may rotate if no torque reference or Torque Limit is supplied from the PLC.
<6>
Parameter setting value is not reset to the default value when the drive is initialized.
<7>
Cycle power for setting changes to take effect.
<8>
When F7-13 is set to 0, parameters F7-01 to F7-12 must be set, and all IP Addresses (as defined with parameters
F7-01 to F7-04) must be unique.
<9>
When F7-14 is set to 0 or 2, parameter F7-15 must be set.
<10>
Setting range differs depending on drive software version. PRG: 1020 and earlier, Range: 0 to 2
PRG: 1021 and later, Range: 0 to 8
<11>
Setting range differs depending on drive software version. PRG: 1020 and earlier, Range: 10, 100
PRG: 1021 and later, Range: 10; 100 to 102
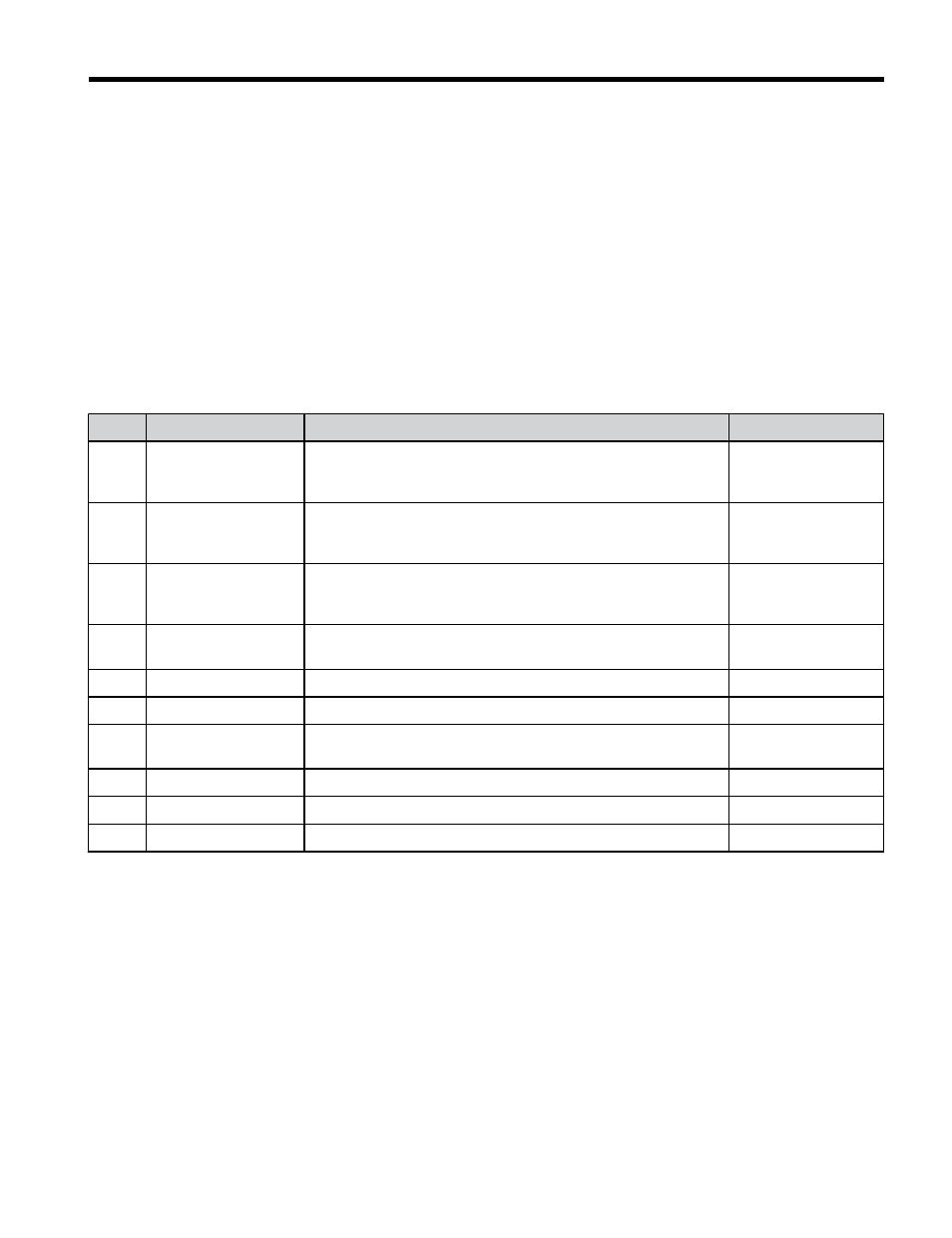
Table 5 Option Monitors
No.
Name
Description
Value Range
U6-80
to
U6-83
Online IP Address
IP Address currently available; U6-80 is the most significant
octet
0 to 255
U6-84
to
U6-87
Online Subnet
Subnet currently available; U6-84 is the most significant octet 0 to 255
U6-88
to
U6-91
Online Gateway
Gateway currently available; U6-88 is the most significant
octet
0 to 255
U6-92 Online Speed
Link Speed
10: 10 Mbps
100: 100 Mbps
U6-93 Online Duplex
Duplex Setting
0: Half, 1: Full
U6-94 Port 2 Speed
Port 2 Link Speed
0: Half, 1: Full
U6-95 Port 2 Duplex
Port 2 Duplex Setting
10: 10 Mbps
100: 100 Mbps
U6-96 RSTP
RSTP Role and State
0000 to 9292
U6-98 First Fault
First Option Fault
–
U6-99 Current Fault
Current Option Fault
–
6 Related Drive Parameters
YASKAWA TOEP YAICOM 18A 1000-Series Option Dual-Port Modbus TCP/IP SI-EM3D Installation Manual
27