Yaskawa MP2000 User Manual
Page 18
MP2000 Quick Reference Guide Rev1.21
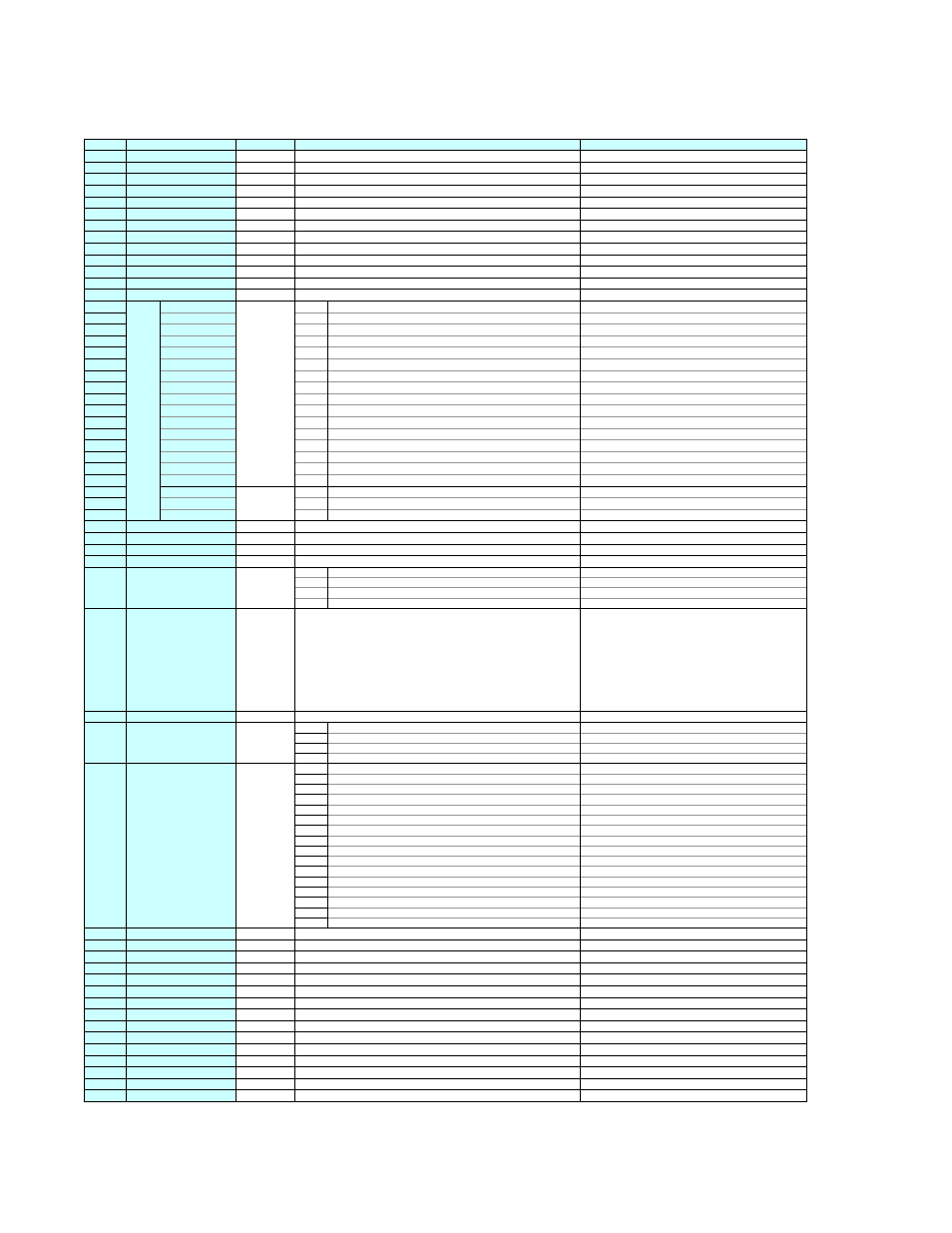
Function Block Specification / Reserved Data Area Access 2/4
-
-
MW30199
-
-
MW30198
-
-
MW30197
-
-
MW30196
-
-
ML30194
-
-
MW30193
-
-
MW30192
-
-
ML30190
-
-
MW30189
-
-
MW30188
1042
-
MW30183
1041
Error ID 2
MW30182
Spare
bit2
Aborted
bit3
-
bit0
Running
bit1
Faulted
1039
Run Status
MW30180
1040
Error ID 1
MW30181
bit0
No Home Switch
bitD
Servo Off
bit1
Over Travel
bit2
Time Out
bit3
Value to Great
bitE
-
bitF
-
-
1 = Jog
bit2
Negative Enabled
bitA
bitB
MW30170
bit2
One Scan Pulse of Motion Block Execution
bit1
-
-
ML30160
-
-
MW30159
-
-
MW30158
RDA
Status
Abort
Command Bit
Accele rating
Decele rating
-
-
ML30156
-
-
ML30154
Steady
Stopping
CCW command
CW command
ML30166
-
-
ML30152
-
-
MW30150
-
-
MW30151
-
-
-
-
ML30164
-
-
MW30163
-
-
MW30162
1000
Stop Axis Motion
bit0
-
-
ML30168
1045
Axis Number
MW30187
Axis Nummber
1044
Module Number
MW30186
Module Nummber
1043
-
ML30184
1038
Block Running
MW30179
Indicates number of block last ran.
Move Type
1036
Servo Enable Type
MW30177
bit0
Servo ON
bit1
Positive Enabled
bit4
Direction Not Allowed
bit7
Servo Alarm
bit5
Pos Error
bit6
No Motor Power
4 = Move Addtive
8 = CAM
0 = Stop
bit3
bitA
RDA Error
bit8
Clear Pending Error
bit9
Track Fail
bitB
Error Stop
bit3
Accele rating
bit4
Decele rating
bitC
Table Error
7 = Gear
6 = Latch Target
1035
Factor FF
Feed Forward Gain for Positioning, CAM, Gear [1000=100%]
ML30176
1034
Encoder Resolution
Postquaditure value [pulse/rev]
ML30174
1033
Motor Rated Speed
[rpm]
MW30173
1031
MW30172
bitF
1032
-
MW30171
~
~
1016
1015
bitF
bit0
1014
1013
bitD
bitE
1012
1009
bit9
CW command
bitC
1010
1011
1008
1007
bit7
Stopping
bit8
CCW command
RDA#
Datas Name
M-Register
1003
1001
Detail
Remarks
1002
1004
1006
bit6
1005
bit5
Steady
5 = Home
1037
Move State
MW30178
2 = Move Relative
3 = Move Absolute
Page 18 of 25