Position units, Digital ratioadj, Mop adjust time – Yaskawa G7 Drive User Manual
Page 8: Ratio adj ramp
Date: 03/31/09, Rev: 09-03
Page 8 of 30
TM.G7SW.064
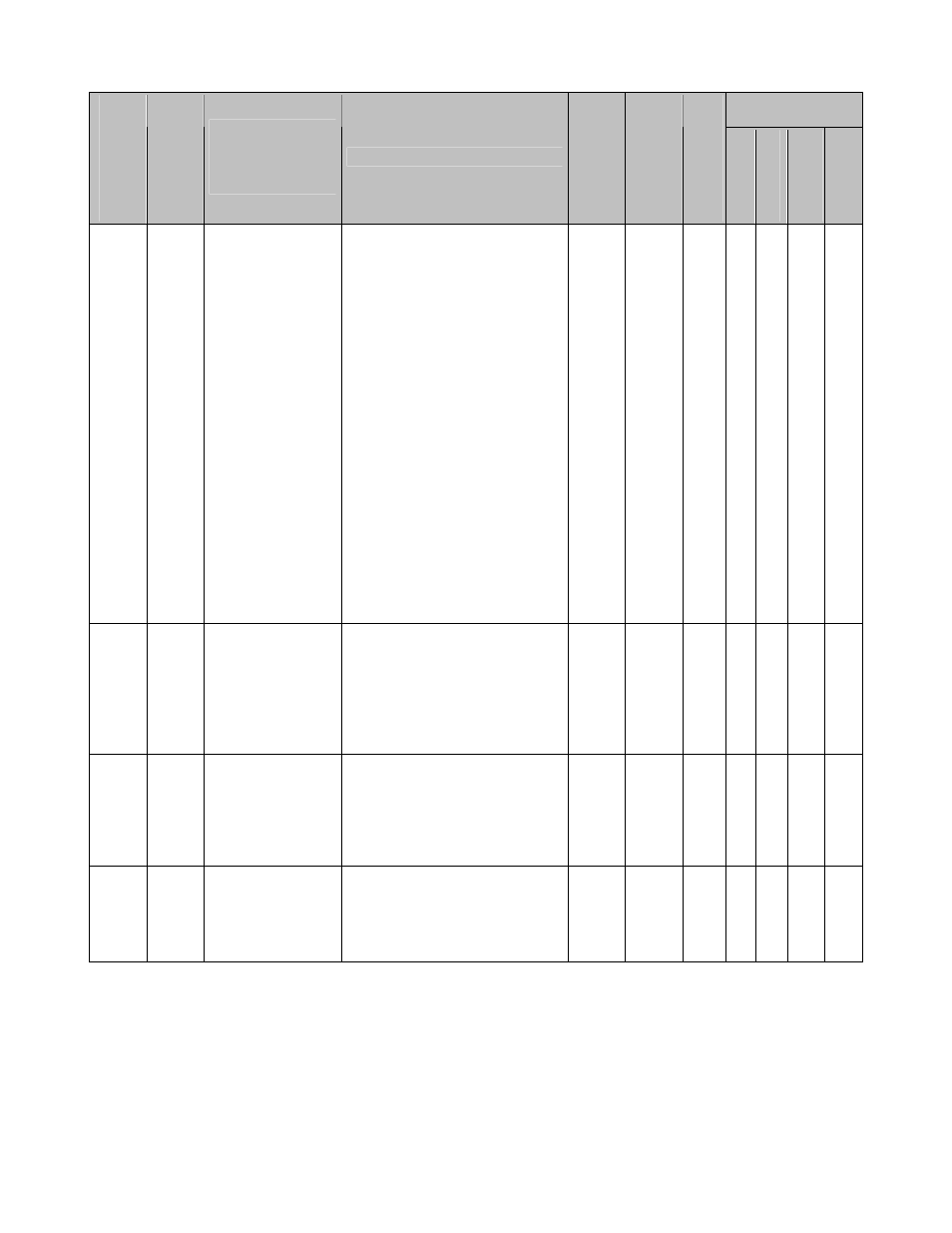
4.1 Parameters (continued)
Control Mode *1
Paramete
r
Numb
er
Modbu
s
Addre
ss
Parameter Name
Digital Operator
Display
Description
Ran
ge
Default
Cha
nge Duri
ng
Run
V/f
V/f w/ P
G
Open Lo
op
Vector 1, 2
F
lux Vector
P1-10 609H
Position Units
Selection
Position Units
Selects the units used for the
follower drive Position Error
Monitor (U1-96).
0: Encoder Counts
Position error is displayed in
quadrature follower encoder
counts (cts).
1: Motor Revs
Position error is displayed in
follower motor revolutions
(0.001rev).
2: Motor Degrees
Position error is displayed in
follower motor degrees
(0.1°).
3: Motor Radians
Position error is displayed in
follower motor radians
(0.001rad).
Note: ELS modes only.
0 ~ 3
0
Yes –
–
–
A
P2-01 60AH
Digital Ratio
Adjustment
Digital RatioAdj
Sets the digital gear ratio
adjustment of the follower
drive. The gear ratio
adjustment is also influenced
by the analog, MOP and
communication gear ratio
adjustments.
-99.99
~
+99.99
%
0.00 Yes A A A A
P2-02 60BH
MOP Adjust Time
MOP Adjust
Time
Sets the time for the MOP ratio
adjustment to change by
100.00% when the MOP
Adjust Increase or MOP Adjust
Decrease multi-function input
is closed.
0.0 ~
6000.0
sec
50.0 Yes A A A A
P2-03 60CH
Gear Ratio
Adjustment Ramp
Time
Ratio Adj Ramp
Sets the time for the composite
gear ratio adjustment of the
follower drive to change by
100.00%.
0.0 ~
6000.0
sec
10.0 Yes A A A A
*1: Access Level (A1-01): Q = “Quick Start”, A = “Advanced”, F = “Factory”, – = Not Available.