Yaskawa G7 Drive User Manual
Page 23
Date: 03/31/09, Rev: 09-03
Page 23 of 30
TM.G7SW.064
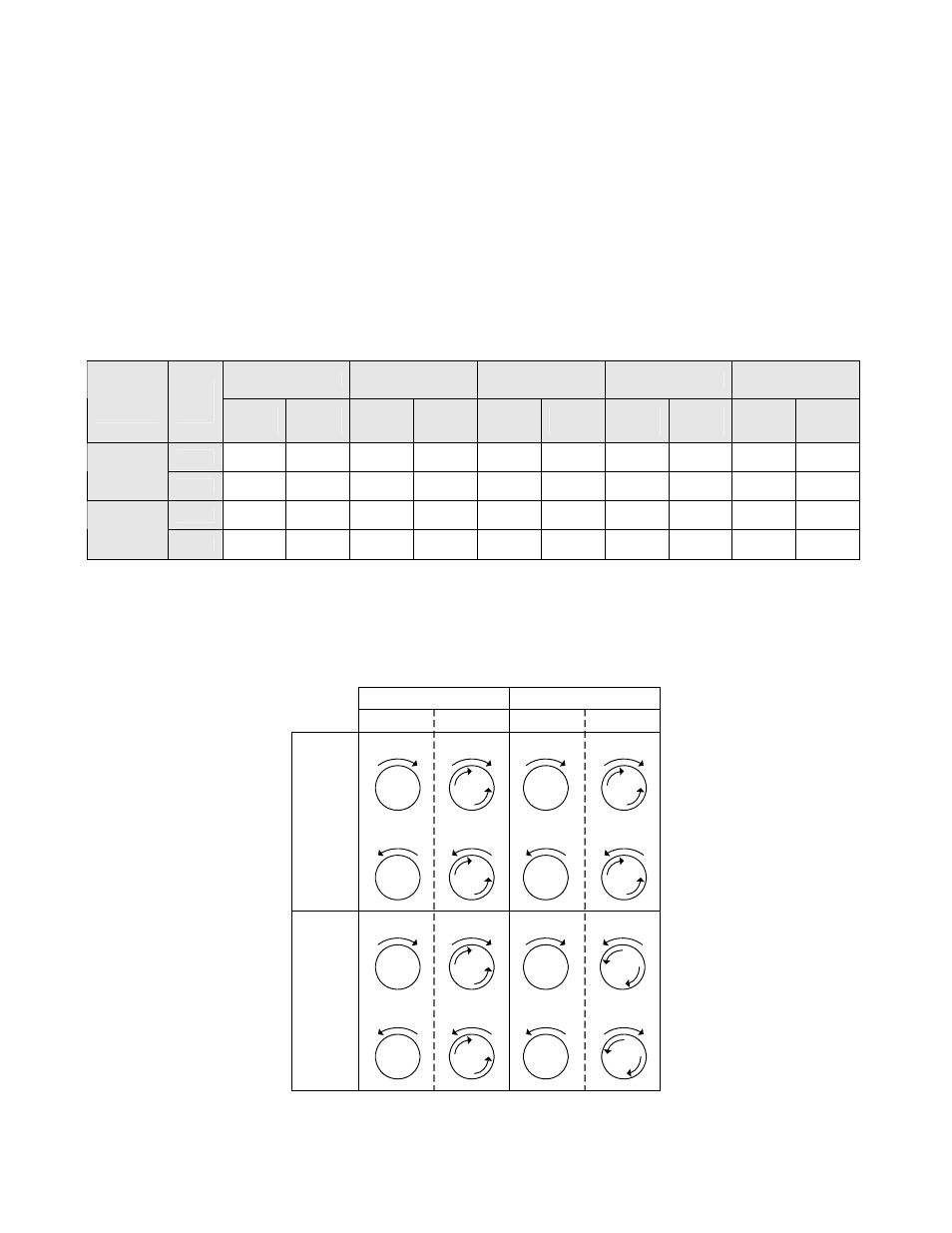
For the ELS - Sign Run mode (P1-01 = 5), the functionality of the Communication Advance/Retard Counts
Register is adjusted in the same way. With a forward run command, a positive value in the register will
move the follower drive in the absolute positive direction and a negative value will move the follower drive in
the absolute negative direction, while with a reverse run command these directions are switched. The
direction the follower is moved by the Advance/Retard command is always with respect to the run command
direction. The functionality of Advance/Retard for both P1-01 = 4 (Standard ELS) and P1-01 = 5 (ELS - Sign
Run) is shown in Figure 4.
When the drive is put into local mode (digital input or keypad button) or when the drive is given a forward or
reverse jog command, the frequency reference is switched back to standard frequency reference and the
selected Accel / Decel times are used.
The table below shows the direction of the Follower depending on the direction of the Master, P1-01 setting,
B1-04 (reverse operation prohibit selection) setting, and the forward run / reverse run digital input signal.
Follower Rotation Direction for Various Settings and Master Direction
P1-01 = 1
P1-01 = 2
P1-01 = 3
P1-01 = 4
P1-01 = 5
B1-04
(Reverse
Operation)
Digital
Input
Signal
Master:
FWD
Master:
REV
Master:
FWD
Master:
REV
Master:
FWD
Master:
REV
Master:
FWD
Master:
REV
Master:
FWD
Master:
REV
FWD FWD REV FWD NONE FWD FWD FWD REV FWD REV
B1-04 = 0
Enabled
REV REV FWD NONE REV REV REV FWD REV REV FWD
FWD FWD NONE FWD NONE FWD FWD FWD NONE
b
FWD
NONE
b
B1-04 = 1
Disabled
REV NONE NONE NONE NONE NONE NONE NONE
a
NONE
b
NONE
a
NONE
b
a: Inability to follow causes position error accumulation and potential FDEV faults in these conditions.
b: Inability to follow does not cause position error accumulation in these conditions unless P1-09 = 1, due to
the way the drive handles the B1-04 = 1 condition.
Figure 4 below outlines the follower direction and Advance/Retard behavior for P1-04 settings and forward /
reverse run command selections.
FWD
FWD
Adv
Ret
REV
REV
Ret
Adv
REV
Adv
Ret
FWD
REV
FWD
Adv
Ret
FWD
FWD
Adv
Ret
REV
REV
Ret
Adv
FWD
REV
FWD
Adv
Ret
REV
Ret
Adv
FWD Run Command
REV Run Command
P1-01 = 4
P1-01 = 5
Master
Follower
Master
Follower
Figure 4: Follower Direction and Advance/Retard Behavior