Yaskawa MP940-MW+ User Manual
Page 16
TECHNICAL NOTE
MOTION PRODUCT AND ENGINEERING GROUP
Yaskawa Electric America - 2121 Norman Drive South – Waukegan IL 60085
(800) YASKAWA - Fax (847) 887-7280
5/22/2003
16 of 34
eng/PubNumber/MCD
Running
The rest of the blocks are executed while the system is
engaged in gearing (or running). The user is able to adjust the
gearing ratio by modifying the variables (user variables [GearMaster]
divided by [GearSlave]) in the Gear Ratio block (5). The gear ratio is a
fraction of two integer numbers, be careful not to use floating-point
variables for these. The values will be truncated and lost motion may
be realized.
07 Cam
The Cam subroutine looks quite difficult at first glance, however it is actually quite simple.
Broken down into three sections, makes it easier to follow. The three sections include: Engaging,
Disengaging, and Running. (Note: Cam table generation, using Cam Tool is beyond the scope of
this document)
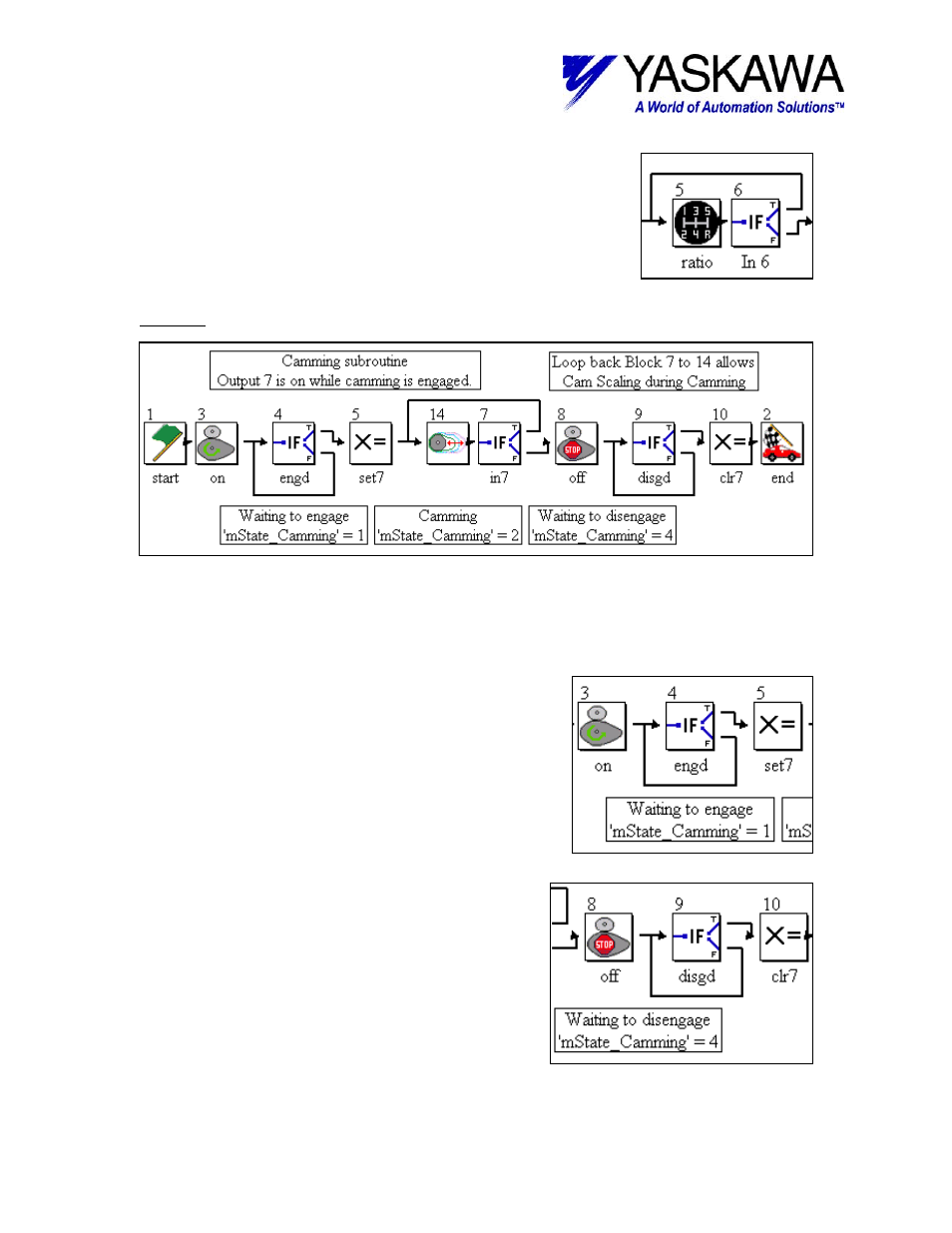
Engaging
The Cam engage consists of block 3-5. The Cam
engages at a particular Master position based on the value
entered in block three, for this program 0 master units is the
position used. Block 3 also sets the system variable
mState_Camming = 1, this indicates that the system is
waiting to engage. While waiting to engage
(mState_Camming = 1) execution is held at block 4. Once
engaged (mState_Camming = 2) output 7 is turned on solid.
Disengaging
Disengagement begins after input 7 has been
deactivated and consists of block 8-10. This works quite
similarly to engaging, in Block 8 the disengage position is
specified. Again, for this program 0 master units is the
position used. Block 8 sets mState_Camming = 4, while
disengaging execution is held at block 9. Once the
disengage position has passed (mState_Camming = 0),
output 7 is deactivated and the subroutine is exited.