Flowserve 510si Series Digital Positioner User Manual
Page 5
5
®
User Instructions Logix 510si - LGENIM0510-0
2 12/13
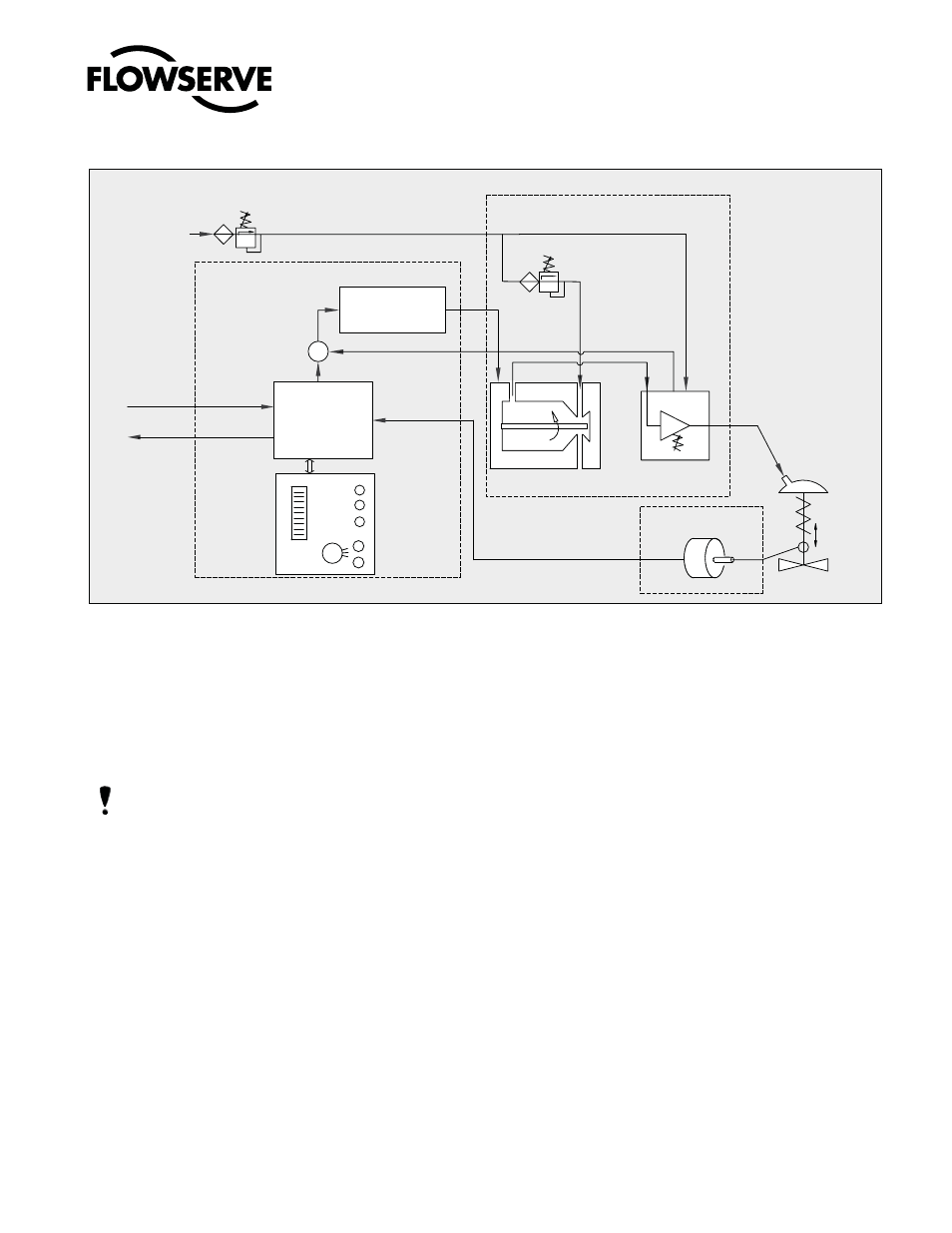
Figure 1: Logix 510si Principle of Operation
for all applications due to the close tolerances in the
positioner. Optional analog feedback system as well
as limit switch unit and a directly attachable double
acting module complete the Logix 510si positioner
accessories.
NOTE: The air supply must conform to ISA 7.0.01or
IEC 770 (a dew point at least 10 ˚C / 18 ˚F below ambi-
ent temperature, particle size below five microns – one
micron recommended – and oil content not to exceed
one part per million).
5
PRINCIPLE OF OPERATION
The Logix 510si positioner is a digital positioner with
various options. The positioner consists of three main
modules:
1. The microprocessor-based electronic control
module includes direct local user interface switches
2. The piezo valve-based electro-pneumatic converter
module
3. The infinite resolution valve position sensor.
/RFDO
8VHU
,QWHUIDFH
²P$
,QQHU/RRS
3LH]R&RQWURO
6WURNH
,QQHU/RRS
3RVLWLRQ)HHGEDFN
'LJLWDO&RQWURO&LUFXLW
(OHFWURSQHXPDWLF
&RQYHUWHU0RGXOH
9DOYH3RVLWLRQ
6HQVRU
)LOWHU5HJXODWRU
IRU6XSSO\$LU
²EDU²SVL
$LU6XSSO\
0LFUR
3URFHVVRU
*DLQ
3UHVVXUH5HJXODWRU
3LH]R9DOYH
3QHXPDWLF
$PSOLILHU
&RQWURO9DOYH
²P$
,QSXW
2XWSXW
SWLRQDO
The basic positioner operation is best understood by refer-
ring to Figure 1. The complete control circuit is powered
by the two-wire, 4-20 mA command signal. The analog
4-20 mA command is passed to the microprocessor,
where it is compared to the measured valve stem posi-
tion. The control algorithm in the processor performs
control calculations and produces an output command
to the piezo valve, which drives the pneumatic amplifier.
The position of the pilot valve in the pneumatic amplifier
is measured and relayed to the inner loop control circuit.
This two-stage control provides for more responsive and
tighter control than is possible with a single stage control
algorithm. The pneumatic amplifier controls the airflow to
the actuator. The change of pressure and volume of the air
in the actuator causes the valve to stroke. As the valve ap-
proaches the desired position, the difference between the
commanded position and the measured position becomes
smaller and the output to the piezo is decreased. This,
in turn, causes the pilot valve to close and the resulting
flow to decrease, which slows the actuator movement as
it approaches the new commanded position. When the
valve actuator is at the desired position, the pneumatic
amplifier output is held at zero, which holds the valve in
a constant position.