1 ethercat state machine, Ther, Tate – Bronkhorst EtherCAT User Manual
Page 8: Achine
BRONKHORST
®
2.1
E
THER
CAT
S
TATE
M
ACHINE
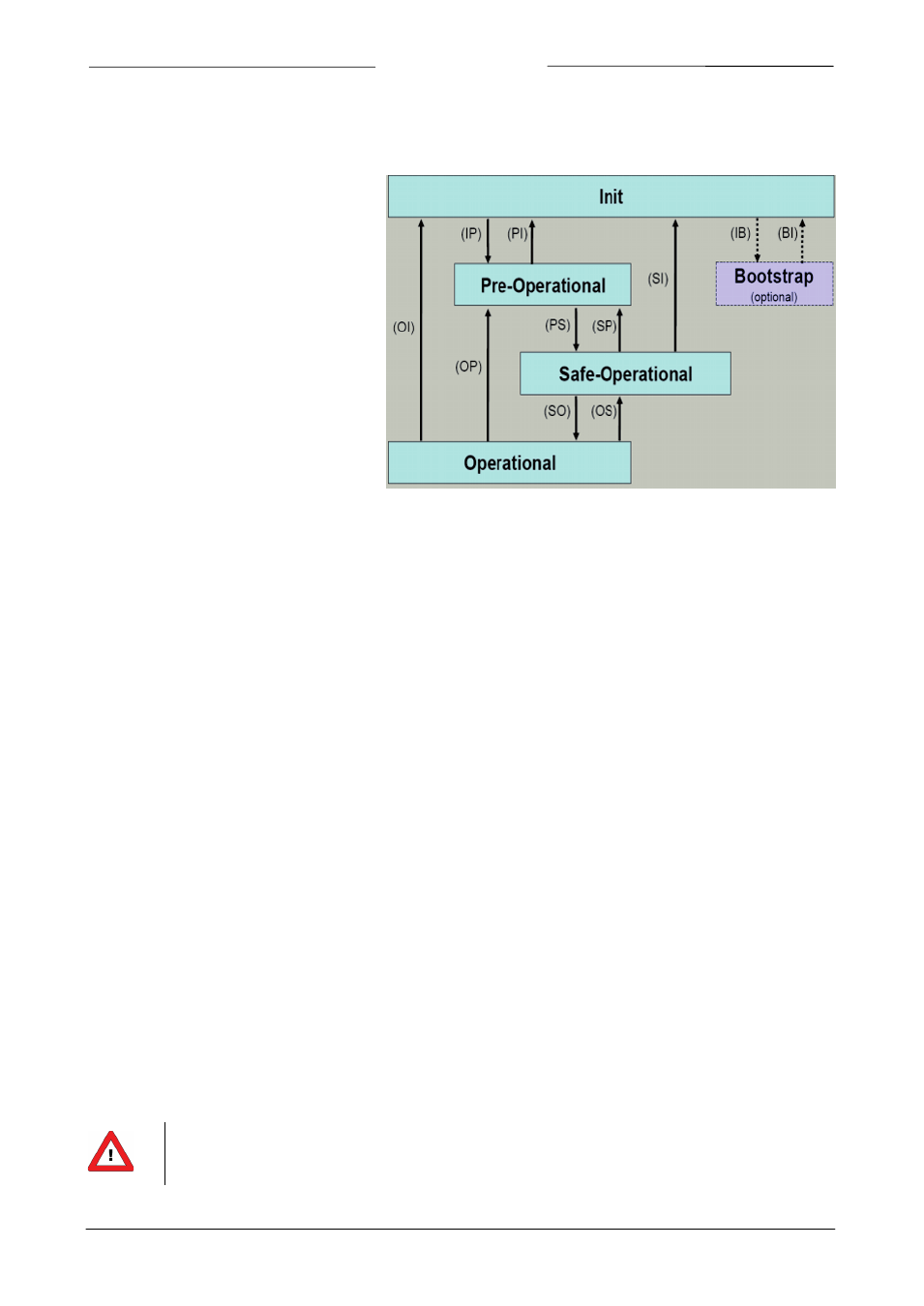
The state of the EtherCAT slave is controlled via the EtherCAT State Machine (ESM). Depending upon the state,
different functions are accessible or executable in the EtherCAT slave. Specific commands must be sent by the
EtherCAT master to the device in each state, particularly during the boot-up of the slave.
A distinction is made between the following
states:
•
Init
•
Pre-Operational
•
Safe-Operational
•
Operational
•
Bootstrap
The regular state of each EtherCAT slave
after boot-up is the Operational state.
Init
After power-on the EtherCAT slave is in the Init state. No mailbox or process data communication is possible. The
EtherCAT master initializes sync manager channels 0 and 1 for mailbox communication
.
Pre-Operational (Pre-Op)
During the transition between Init and Pre-Op the EtherCAT slave checks whether the mailbox was initialized correctly.
In Pre-Op state mailbox communication is possible, but not process data communication. The EtherCAT master
initializes the sync manager channels for process data (from sync manager channel 2), the FMMU channels and PDO
mapping or the sync manager PDO assignment.
Safe-Operational (Safe-Op)
During transition between Pre-Op and Safe-Op the EtherCAT slave checks whether the sync manager channels for
process data communication are correct. Before it acknowledges the change of state, the EtherCAT slave copies
current input data into the associated DP-RAM areas of the EtherCAT slave controller (ECSC). In Safe-Op state mailbox
and process data communication is possible, although the slave keeps its outputs in a safe state, while the input data
are updated cyclically.
Operational (Op)
Before the EtherCAT master switches the EtherCAT slave from Safe-Op to Op it must transfer valid output data.
In the Op state the slave copies the output data of the masters to its outputs. Process data and mailbox
communication is possible.
Bootstrap
In the Bootstrap state the slave firmware can be updated. The Bootstrap state can only be reached via the Init state.
In the Bootstrap state mailbox communication via the file access over EtherCAT (FoE) protocol is possible, but no other
mailbox communication and no process data communication
Bronkhorst EtherCAT instruments do not support the Bootstrap state.
Page 8
EtherCAT interface
9.17.063