State transitions, Boot-up message, Example 1 – BECKHOFF FC5101 User Manual
Page 36: Example 2
Eiserstraße 5 / D-33415 Verl / Telefon 05246/963-0 / Telefax 05246/963-149
36
State Transitions
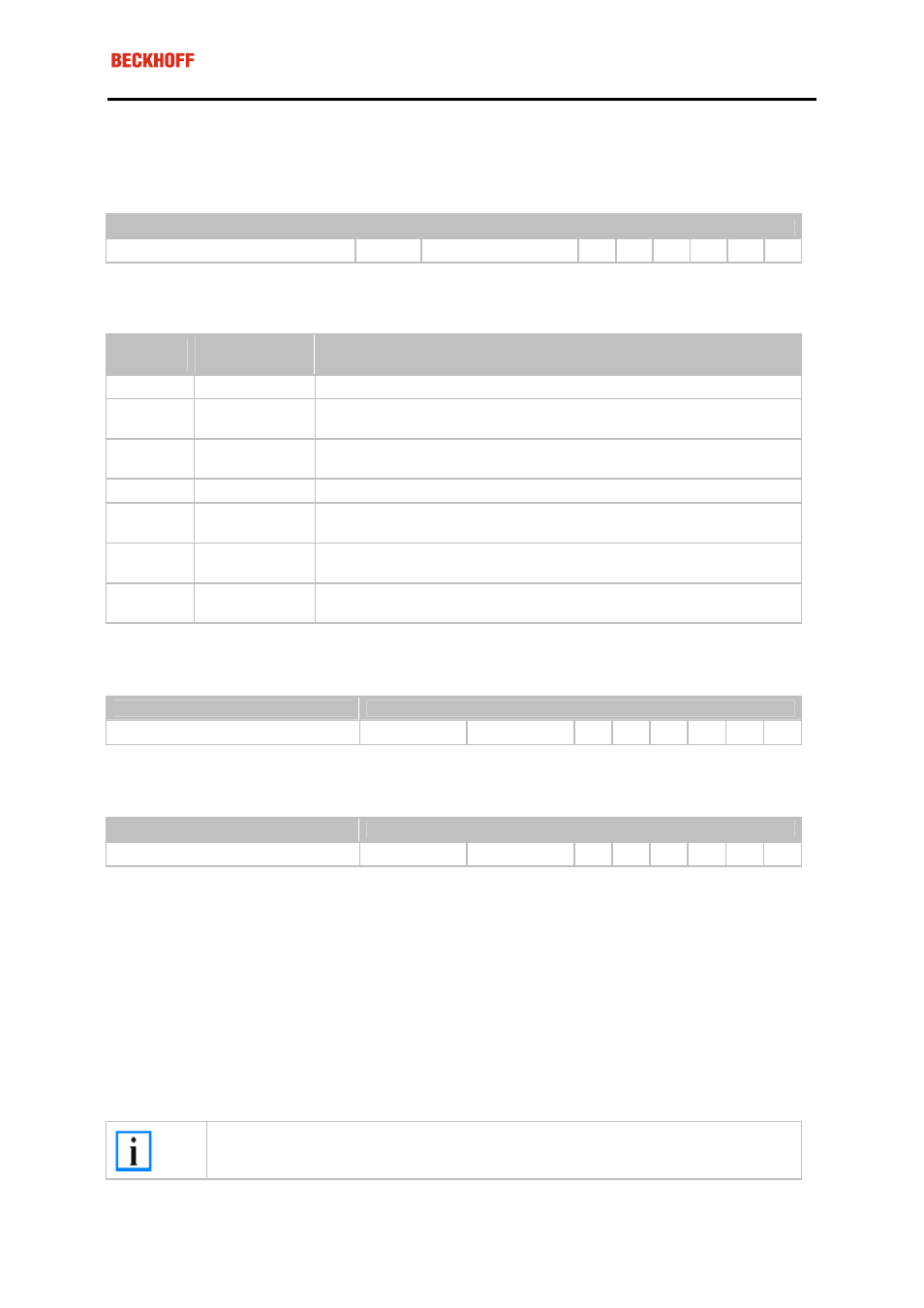
The network management messages have a very simple structure: CAN identifier 0, with two bytes of data con-
tent. The first data byte contains what is known as the command specifier (cs), and the second data byte con-
tains the node address, the node address 0 applying to all nodes (broadcast).
11 bit identifier
2 byte of user data
0x00
cs Node-ID
The following table gives an overview of all the CANopen state transitions and the associated commands
(command specifier in the NMT master telegram):
Status
transition
Command
Specifier cs
Explanation
(1)
-
The initialisation state is reached automatically at power-up
(2)
-
After initialisation the pre-operational state is reached automatically - this
involves sending the boot-up message.
(3), (6)
cs = 1 = 0x01
Start_Remote_Node.
Starts the module, enables outputs, starts transmission of PDOs.
(4), (7)
cs = 128 = 0x80
Enter_Pre-Operational. Stops PDO transmission, SDO still active.
(5), (8)
cs = 2 = 0x02
Stop_Remote_Node.
Outputs go into the fault state, SDO and PDO switched off.
(9), (10),
(11)
cs = 129 = 0x81
Reset_Node. Carries out a reset. All objects are reset to their power-on
defaults.
(12), (13),
(14)
cs = 130 = 0x82
Reset_Communication. Carries out a reset of the communication functions.
Objects 0x1000 - 0x1FFF are reset to their power-on defaults.
Example 1
The following telegram puts all the modules in the network into the error state (outputs in a safe state):
11 bit identifier
2 byte of user data
0x00
0x02
0x00
Example 2
The following telegram resets node 17:
11 bit identifier
2 byte of user data
0x00
0x81
0x11
Boot-up message
After the initialisation phase and the self test, the bus coupler sends the boot-up message, a CAN message
with one data byte (0) and the identifier of the guarding or heartbeat message: CAN-ID = 0x700 + Node-ID. In
this way temporary failure of a module during operation (e.g. due to a voltage interruption), or a module that is
switched on at a later stage, can be reliably detected, even without Node Guarding. The sender can be deter-
mined from the message identifier (see default identifier distribution).
It is also possible, with the aid of the boot-up message, to recognise the nodes present in the network at start-
up with a simple CAN monitor, without having to make write access to the bus (such as a scan of the network
by reading out parameter 0x1000).
Finally, the boot-up message communicates the end of the initialisation phase; the bus coupler signals that it
can now be configured or started.
Note
Up to firmware status BA the emergency identifier was used for the boot up message.