Troubleshooting – Proto-X FPV User Manual
Page 10
10
TROUBLESHOOTING
PROBLEM: Transmitter and quadcopter do not link.
SOLUTION: Make sure the throttle stick is all the way down. Do not move the
sticks or quadcopter during linking.
PROBLEM: Transmitter LED goes out.
SOLUTION: Replace the transmitter AA batteries.
PROBLEM: Transmitter display is not showing the setting interface after holding
down the throttle for 2 seconds.
SOLUTION: The throttle stick needs to be in the full down position.
PROBLEM: Gyros not working well.
SOLUTION: (1) Battery voltage too low. (2) Re-link the quadcopter. (3) Land the
quadcopter, move the throttle sick to the lowest position and wait 5 seconds, then
take off again.
PROBLEM: Quadcopter won’t flip.
SOLUTION: (1) Press the right stick to enter expert menu. (2) In expert mode
the sensitivity on each channel should be above 90%. (3) Make sure to press left
stick to enter flip function. (4) LiPo power is too low, charge battery.
PROBLEM: Quadcopter is shaking and making noise.
SOLUTION: Check that the motors, canopy, body and rotor blades are in good
working order and properly positioned.
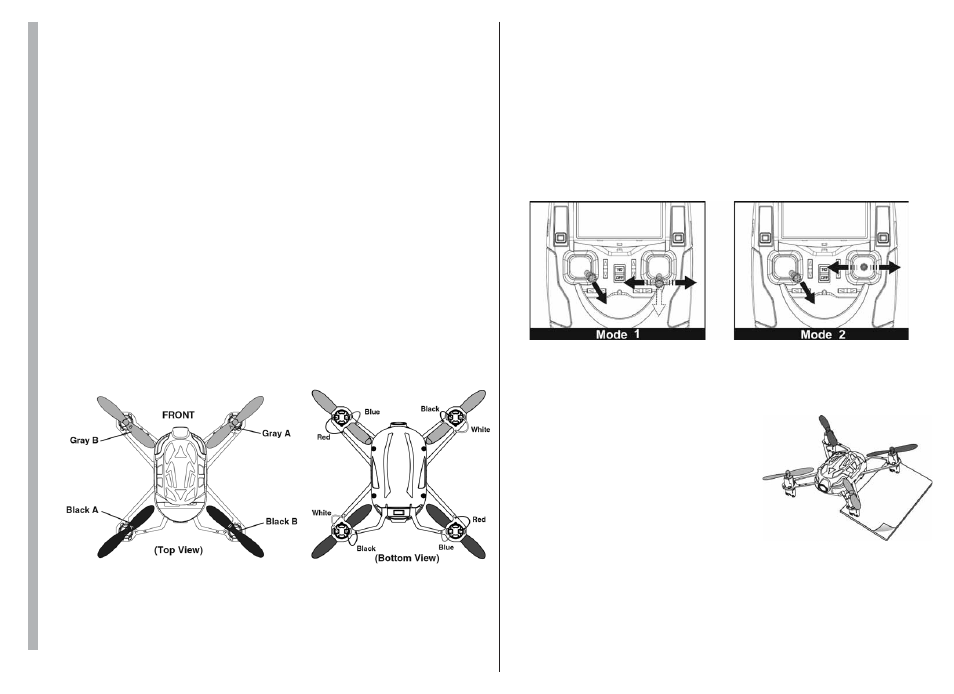
PROBLEM: Quadcopter will not take off.
SOLUTION: (1) Make sure the rotor blades are installed correctly. Rotor blades
are marked with an A for clockwise and B for counterclockwise. Refer to the top
view picture for the correct orientation. (2) There are also two different motors with
two different motor wire colors. Refer to the bottom view picture for clarity.
PROBLEM: One or more motors are not working.
SOLUTION: (1) Replace the motor. (2) Check for loose solder joint between motor
and board. (3) Spin the rotor blades by hand to check for binding.
PROBLEM: Quadcopter always drifts one direction.
SOLUTION: Calibrate the accelerometers as follows:
Before calibrating the accelerometers, make sure the rotor blades, motors
are body are in good condition with the battery fully charged. Make sure the
battery and connector are properly installed into the quad.
1. Put the quadcopter into expert mode.
2. Set both aileron and elevator trims to the middle so the LED displays 50.
Hold the throttle stick to the full down position and move the rudder stick to the
lower right position. Quickly move the aileron stick to the left and right
repeatedly until the two headlights blink indicating successful calibration. This
calibration will reduce excessive drifting when performing level yaw turns.
If the Proto-X FPV HD Quadcopter still
drifts to one side add a few sheets of paper
(the number of sheets will vary depending
on the amount of drift) to the side of the
Proto-X FPV HD Quadcopter that drifts.
The paper will counterbalance the offset in
the accelerometers.
PROBLEM: The Camera does not record.
SOLUTION: (1) Press the button and the camera will start recording. When
the recording is finished, press the button again to save it. If you want so save it
please power off the transmitter. (2) Check the battery in both the transmitter and
quad. If they are low the system will not record.