Futaba GY611 User Manual
Page 10
10
B
EFORE
U
SE
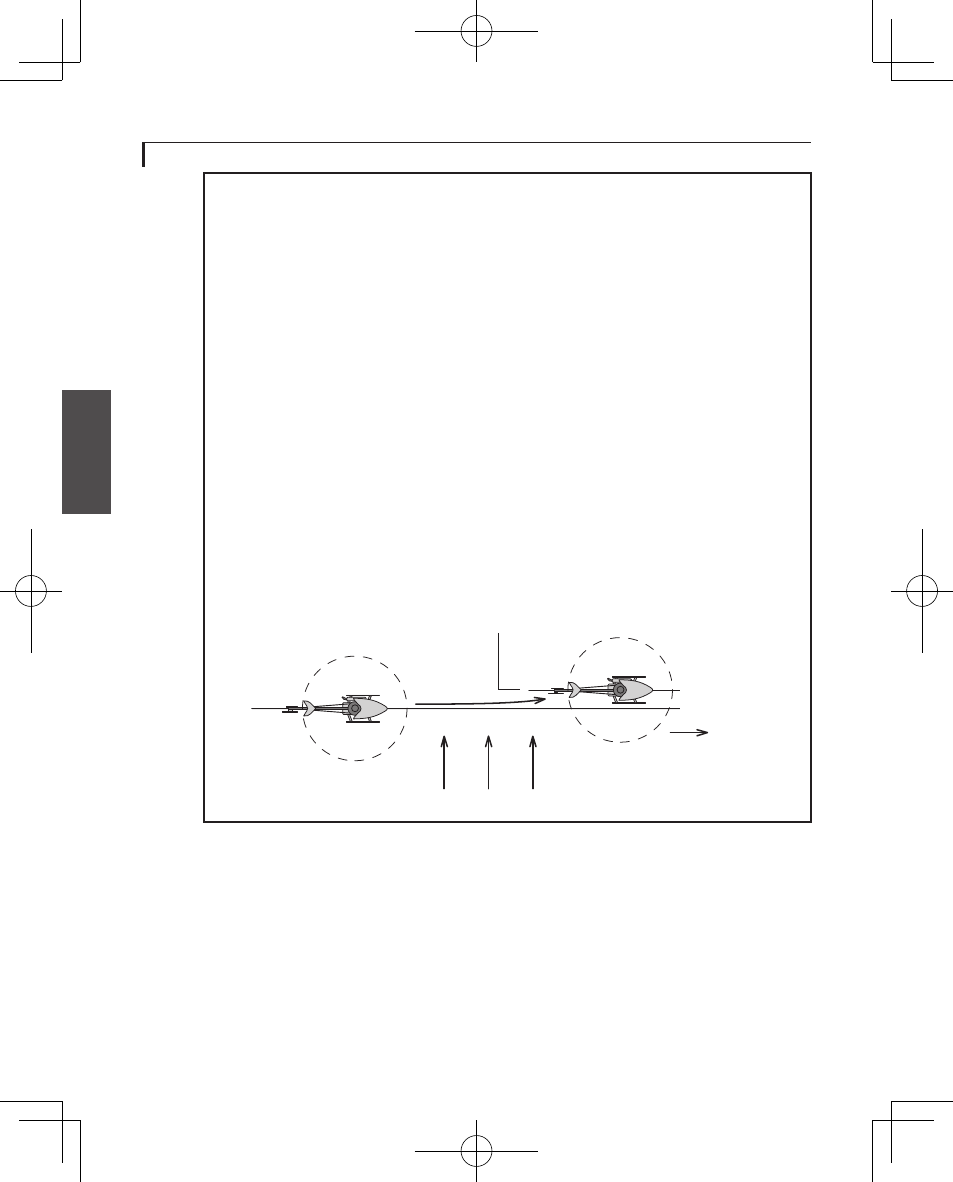
AVCS gyro
This following describes how the AVCS system works when the helicopter
is exposed to a side wind while hovering, the same as the preceding item.
When the helicopter is exposed to a side wind, the tail begins to drift. The
gyro controls the servo so that the movement of the tail stops, the same as
a conventional gyro. At the same time, a sensor is controlled so that the tail
is rotated in the opposite direction (returns to the original position). In short,
the conventional gyro performs an operation known as "drifting stop", but
the AVCS system performs an operation that "stops drifting and returns to
original position". The "return to original position" operation added to the
AVCS system improves rudder trim operation. In other words, the gyro can
automatically trim the rudder against side winds. This also applies to reverse
flight. When a helicopter is flying in the forward and reverse directions, the
rudder trim is changed to advance, but with the AVCS system, this trim
change is performed automatically and instantaneously so that the tail re-
mains extremely stable even during high-speed reverse flight.
The AVCS system requires a high-precision angular velocity sensor. The
GY611 realizes a high-precision angular velocity detection function and ex-
tremely small output drift by using a new type of gyro sensor. This minimizes
rudder neutral position drift during flight and eliminates the need to trim the
rudder during flight.
• The tail remains extremely stable.
Forward
Side wind
Differences in rudder control method
The following describes the differences between conventional gyro
and AVCS gyro rudder control.
The conventional gyro sends the rudder control signals from the
transmitter to the rudder servo and starts to move the tail. When the
tail moves, the gyro detects this movement and generates a signal to
stop it. If the tail continues to move even in this state, a rudder con-