No.36 torque enable(1byte, hex number, read/write) – Futaba RS302CD User Manual
Page 25
25
The setting range is between 0H and 64H.
Ex) Set the maximum torque of servo ID=1 to 80% (50H).
Hdr ID Flg Adr Len Cnt Dat Sum
●No.36 Torque Enable(1Byte, Hex Number, Read/Write)
The servo torque can be enabled and disabled. 01H enables the torque and 00H disables
the torque. When the power is turned on, the torque is disabled (00H). When 02H is set, the
servo enters the brake mode and the servo horn can be freely rotated by hand, but a weak
torque is generated.
*When the Torque is changed from disable to enable, the servo holds the present
position.
Ex. 1) Enable servo ID=1 torque.
Hdr ID Flg Adr Len Cnt Dat Sum
Ex. 2) Disable servo ID=1 torque.
Hdr ID Flg Adr Len Cnt Dat Sum
Ex. 3) Set servo ID=1 to the brake mode.
Hdr ID Flg Adr Len Cnt Dat Sum
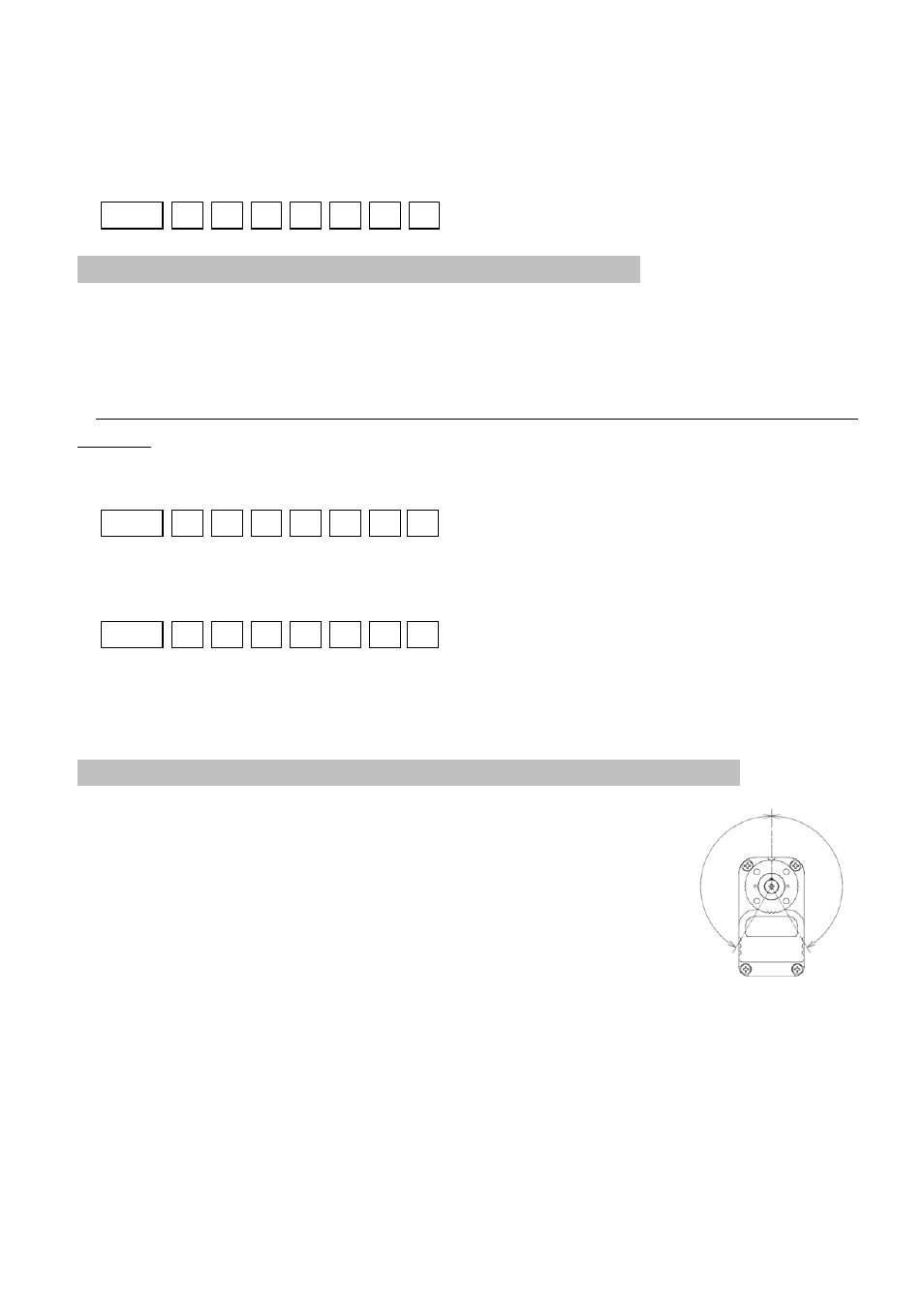
●No.42 / No.43 Present Position(2Bytes, Hex Number, Read Only)
The present angle of a servo can be read. The angle information
of the present position can be obtained in 0.1 degree units within a
range of -150 degrees in the CCW (counterclockwise rotation)
direction and 150 degrees in the CW (clockwise rotation) direction
with the center of the variation range as 0 degree as shown in the
Fig. 4-2
.
Ex.) Read the present position of servo ID=1.
To obtain the value of address Nos. 42 and 43 of the servo as a
return packet, send a “Flag” bit 3=1, bit2=0, bit1=0, bit0=1 send packet. After this packet is
sent, the value of memory map address Nos. 42 to 59 is returned from the servo(See the
Flags item of “Short packet” on p.13 for more information.) Here, The Torque Enable
command and the flag of memory map address Nos. 42 ~ 59 are sent to servo ID=1.
FA AF
01 00 23
01
72
01 50
FA AF
01 00 24
01
24
01 01
FA AF
01 00 24
01
25
01 00
0°
+150
-
150°
Fig.
4-2
servo range