B&G Zeus2 12 User Manual
Page 30
24 |
Software setup |
Zeus2 Installation Manual
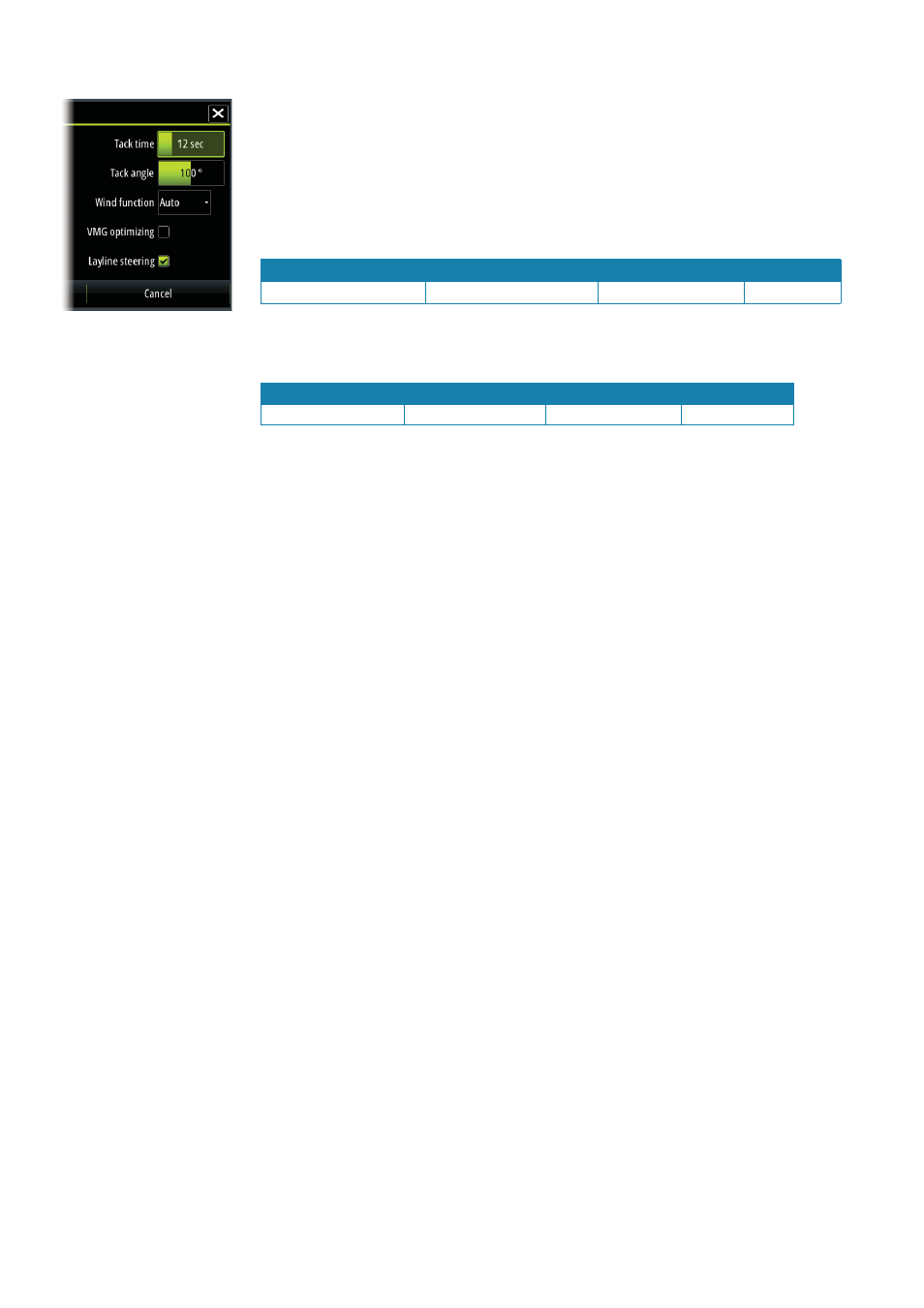
Setting sailing parameters
Note:
Sailing parameter settings are only available if the boat type is set to Sail.
Tack time
When performing a tack in WIND mode, the rate of turn (tack time) can be adjusted. This will
give single-handed sailors time to handle the boat and the sails during a tack.
A turn performed without shifting wind side, will also be made at a controlled turn rate.
Range
Change per step
Default
Units
2 - 50
1
12
seconds
Tack angle
This value is used to preset the course change used when tacking in AUTO mode. By pressing
the left/right arrow keys the course will change as much as this value.
Range
Change per step
Default
Units
50 - 150
1
100
°
Wind function
With wind function set to Auto, the autopilot will automatically select between apparent and
true wind steering. Auto is default and recommended for cruising.
When the boat is running or on a broad reach, there is a heightened chance it will surf on the
waves. This may lead to signifi cant changes in boat speed, and thereby changes in apparent
wind angle. True wind steering is therefore used to prevent undesired corrections by the
autopilot when heading downwind (or close to), while steering to apparent wind is used
when beating or reaching.
Apparent wind steering is preferred when you want to maintain maximum boat speed
without continuous trimming of the sails.
VMG optimizing
You can optimize the VMG to wind. When selected the function will be active for 5–10
minutes after a new wind angle has been set and only when beating.
Layline steering
Layline steering is useful when navigating. Cross Track Error (XTE) from the navigator will keep
the boat on the track line. If the XTE from the navigator exceeds 0.15 nm, the autopilot will
calculate the layline and track towards the waypoint.
Manually adjusting steering parameters
The autotune function in the autopilot is so refi ned that the majority of boats will need no
further adjustments of the steering parameters. On some boats however, or in particular
sea conditions, fi ne tuning of the steering parameters may improve the performance of the
autopilot.
Transition speed
Refer previous description.
Rudder
This parameter determines the ratio between commanded rudder and the heading error. The
higher rudder value the more rudder is applied.
If the value is too small it will take a long time to compensate for a heading error, and the
autopilot will fail to keep a steady course.
If the value is set too high the overshoot will increase and the steering will be unstable.
Counter rudder
Counter rudder is the amount of rudder used to try to prevent the boat from yawing around
the set course. Higher counter rudder settings result in more rudder being applied.
The best way of checking the value of the Counter rudder setting is when making turns.
The fi gures illustrate the eff ects of various Counter Rudder settings;