RMS Technologies IMD23 W/ POLE DAMPING TECHNOLOGY User Manual
Page 9
Configuration Module (ACC-02)
Page 9
Version 1.00
8/31/2007
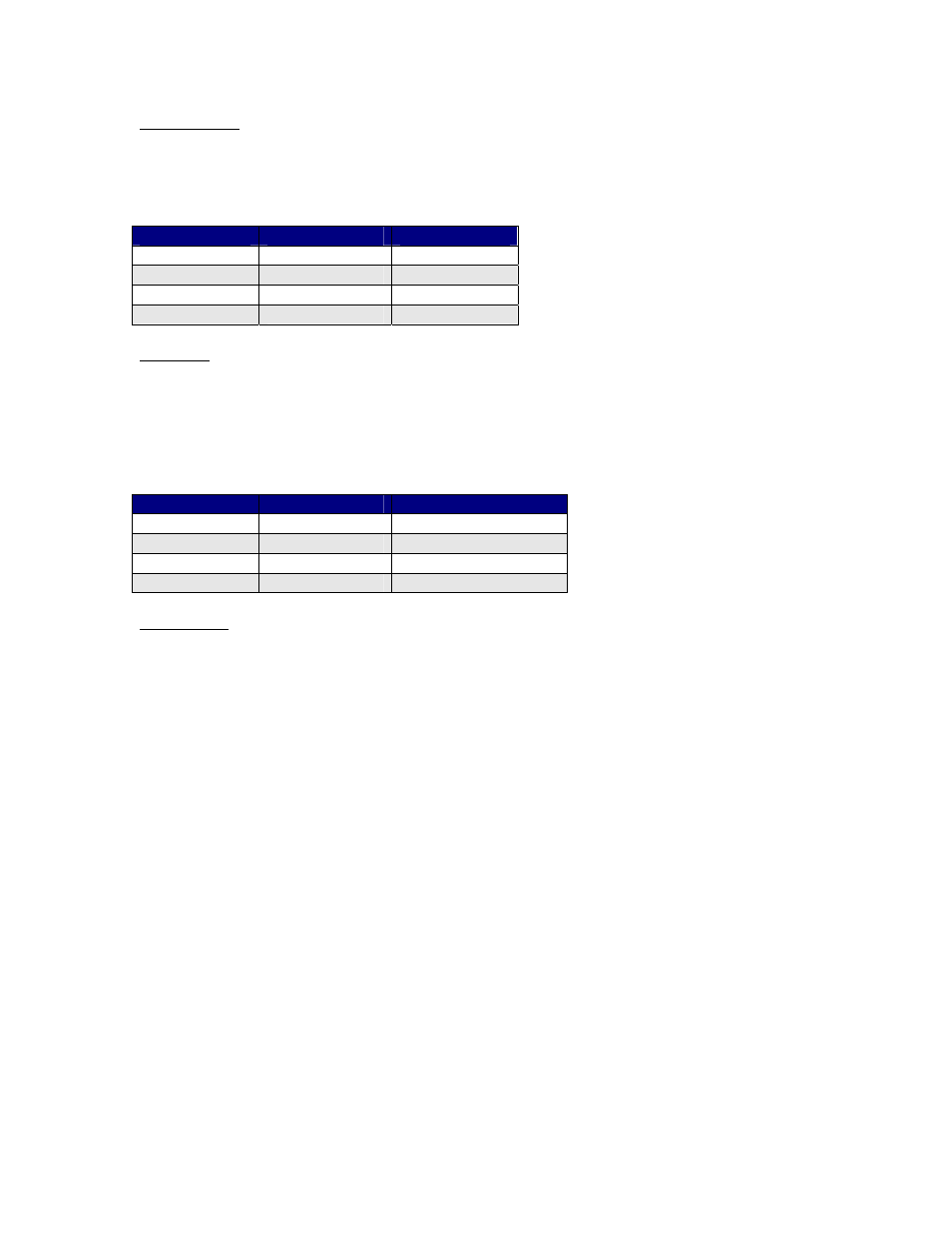
Hold Current
The motor changes from run current to hold current 2.25 seconds after the motor
stops stepping. Four percentage selections are available for hold current. It is a
percentage of the selected run current.
HOLD CUR 0 HOLD CUR 1 Holding %
OFF OFF
0%
ON
OFF
25%
OFF ON
50%
ON
ON
100%
Damping
A total of four damping modes are provided in order to aid in resonance and
vibration within the motor. This is also known as mixed decay. The current
waveform is dampened to create a smoother motion profile. The most effective
damping mode is motor dependent. Generally speaking, less damping is good for
low speeds, and more damping is good for higher speeds.
DAMPING 0
DAMPING 1
Decay type
OFF OFF
Fast
decay
ON
OFF
17% mixed decay
OFF ON
37%
mixed
decay
ON
ON
Slow decay
Step Sense
This feature allows for more compatibility with controllers and PLC’s. The driver
technology from RMS Technologies (in conjunction with Lin Engineering) receives
step pulses from a pulse train, normally a TTL signal, sensing each pulse, one by
one.
The “step sense” feature can choose where to sense each pulse: on the rising edge
of the step or the falling edge (also known as the positive or negative edge).
The switch has two options:
ON: Reads the step signal on the rising edge or positive edge
OFF: Reads the step signal on the falling edge or negative edge
Below depicts a step pulse train waveform where the rising edge is more of a curve.
If the configuration module is set to read this type of signal on the rising edge,
inaccurate steps and unsmooth motion may occur.
It is best to switch the step sensing to the negative edge, or falling edge.