Beijer Electronics AN-BEI-P2-050 User Manual
Page 3
APPLICATION NOTE AN-BEI-P2-050
Date: 15/02/12
AN-BEI-P2-050 Open Loop Permanent Magnet Motor Control
3
Firmware Overview – Standard Parameters for PM motor set-up:
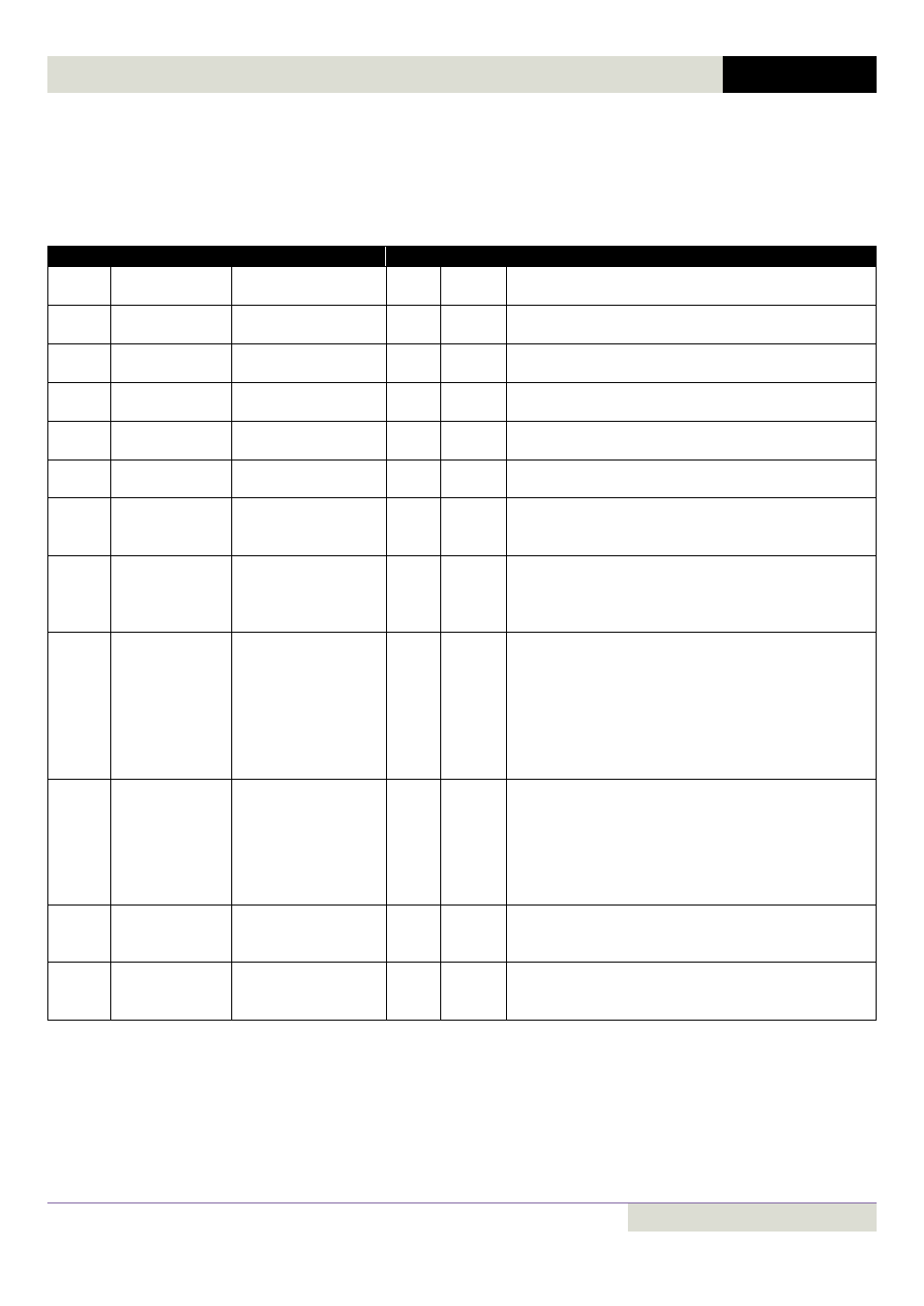
The following parameters are taken from the main Beijer Frequency Inverter P2 user manual but are required for
set-up / configuration of a PM motor. Parameters highlighted in ‘Blue’ are essential for successful PM motor control
with the Beijer Frequency Inverter P2. They are not configured during the auto-tune function and must be entered
manually:-
Par.
Description
Range
Units
Default
Explanation
P1-03
Acceleration
ramp time
0 – 3000.0
Sec
5.0
Acceleration ramp time from 0 to base speed (P1-09) in
seconds
P1-04
Deceleration
ramp time
0 – 3000.0
Sec
5.0
Deceleration ramp time from base speed (P1-09) to
standstill in seconds
P1-07
Nominal back
emf
0 – 250 / 500
Volts
(rms)
8
Phase – Phase voltage imposed by magnets while
motor rotating at motor rated speed (P1-10)
P1-08
Motor rated
current
25 – 100% of drive
rated current
Amps
(rms)
0.13
Rated (nominal) phase current of the motor (used for
over-current protection)
P1-09
Motor rated
frequency
25 – 500
Hz
0.13
Rated (nominal) frequency of the motor.
P1-10
Motor rated
speed
0 – 60,000
Rpm
0
Rated (nominal) speed of the motor.
P2-24
Switching
frequency
4 - 32
kHz
Model
Based
Value
Effective Power Stage switching frequency. Higher
frequencies give smoother operation but care must be
taken to apply necessary de-rate factors.
P4-02
Motor
parameter
auto-tune
0: Disable
1: Enable
---
0
When set to 1 the drive will perform an auto-tune
immediately of exiting the parameter. Values will be
written automatically to parameters P7-01, P7-03, &
P7-06.
P4-03
Speed
Controller
proportional
Gain
0.0 – 400.0
%
25.0
Sets the proportional gain value for the speed
controller. Higher values provide better output
frequency regulation and response. Too high a
value can cause instability or even over current
trips. For applications requiring best possible
performance, the value should be adjusted to suit
the connected load.
P4-04
Speed
Controller
integral time
constant
0.000 – 1.000
s
0.500
Sets the integral time for the speed controller.
Smaller values provide a faster response in
reaction to motor load changes, at the risk of
introducing instability. For best dynamic
performance, the value should be adjusted to suit
the connected load.
P4-07
Maximum
motoring
Torque limit
P4-08 – 200
%
200
When P4-01 is set to 3, sets the maximum torque limit.
P4-09
Maximum
generating
Torque limit
0.0 - 200
%
200
Sets the maximum regenerating torque limit permitted
by the drive.