Pin description table, Operational functional description, Zxbm1016 – Diodes ZXBM1016 User Manual
Page 5
ZXBM1016
© Zetex Semiconductors plc 2007
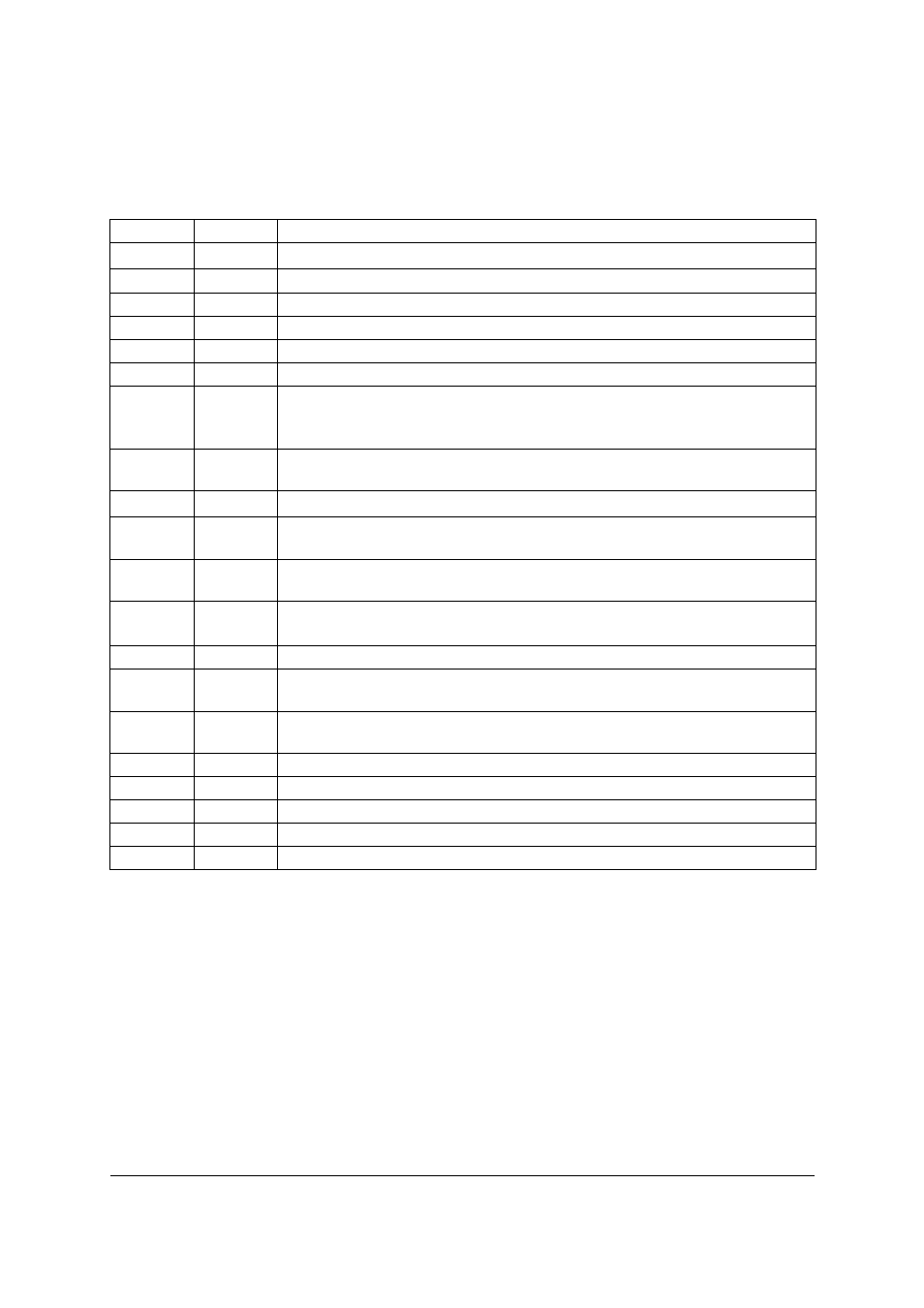
Pin description table
Operational functional description
Overview
The ZXBM1016 is a high efficiency, low noise, single-phase DC brushless motor pre-driver. It uses
voltage speed control and this voltage can be derived from either a PWM or thermistor source.
The device contains proprietary circuitry to control and limit the current at the end of a
commutation cycle. This tail-end current control (TECC) enables the use of lower rated
components thus providing for a more economic and higher efficiency solution.
The pre-driver also has the usual minimum speed setting and maximum current control
functions.
Pin
Type
Description
V
CC
Power
The positive supply pin
Gnd
Power
The negative supply pin
ThRef
Reference A 5 volt reference for external networks
H-Bias
Reference A nominal 1.75V reference used as the supply for naked Hall sensors
H+
Input
Hall device positive input. When high in relation to H- Ph2 is active
H-
Input
Hall device negative input
SPD
Input
Speed control input voltage, typically from a PWM integrator or
thermistor.
When low in relation to C
PWM
the phase low outputs will be turned on
S
MIN
Input
Used to set a voltage that represents the minimum speed the motor is to
run at
C
PWM
Input
A capacitor on this pin is used to set the PWM frequency
C
LCK
Input
A dual use pin used to set the lock and tail-end current control timing.
This will typically be a 470nF capacitor
Range
Input
A resistor is attached between this pin and ThRef to set the device’s
dynamic operating range to the motor’s desired speed range
C
INT
Input
A capacitor is attached to this pin for use by the tail-end current control.
This will normally be the same value as that on the C
LCK
Pin
FG
Output
Open collector buffered output from the Hall sensor
SetTh
Input
Used to set the threshold voltage that represents the maximum current
to be taken by the motor
Sense
Input
Input for the signal from a sense resistor in the ground return of the
H-bridge driving circuit used to represent the current taken by the motor
SetThRef
Analogue A variable voltage source used to set the voltage on the SetTh pin
Ph1Hi
Output
Phase 1 high power output to high-side of H-bridge
Ph2Hi
Output
Phase 2 high power output to high-side of H-bridge
Ph1Lo
Output
Phase 1 high power output to low-side of H-bridge
Ph2Lo
Output
Phase 2 high power output to low-side of H-bridge