Velleman SPBS10 User Manual
Page 8
SPBS10
28.09.2009
©Velleman nv
8
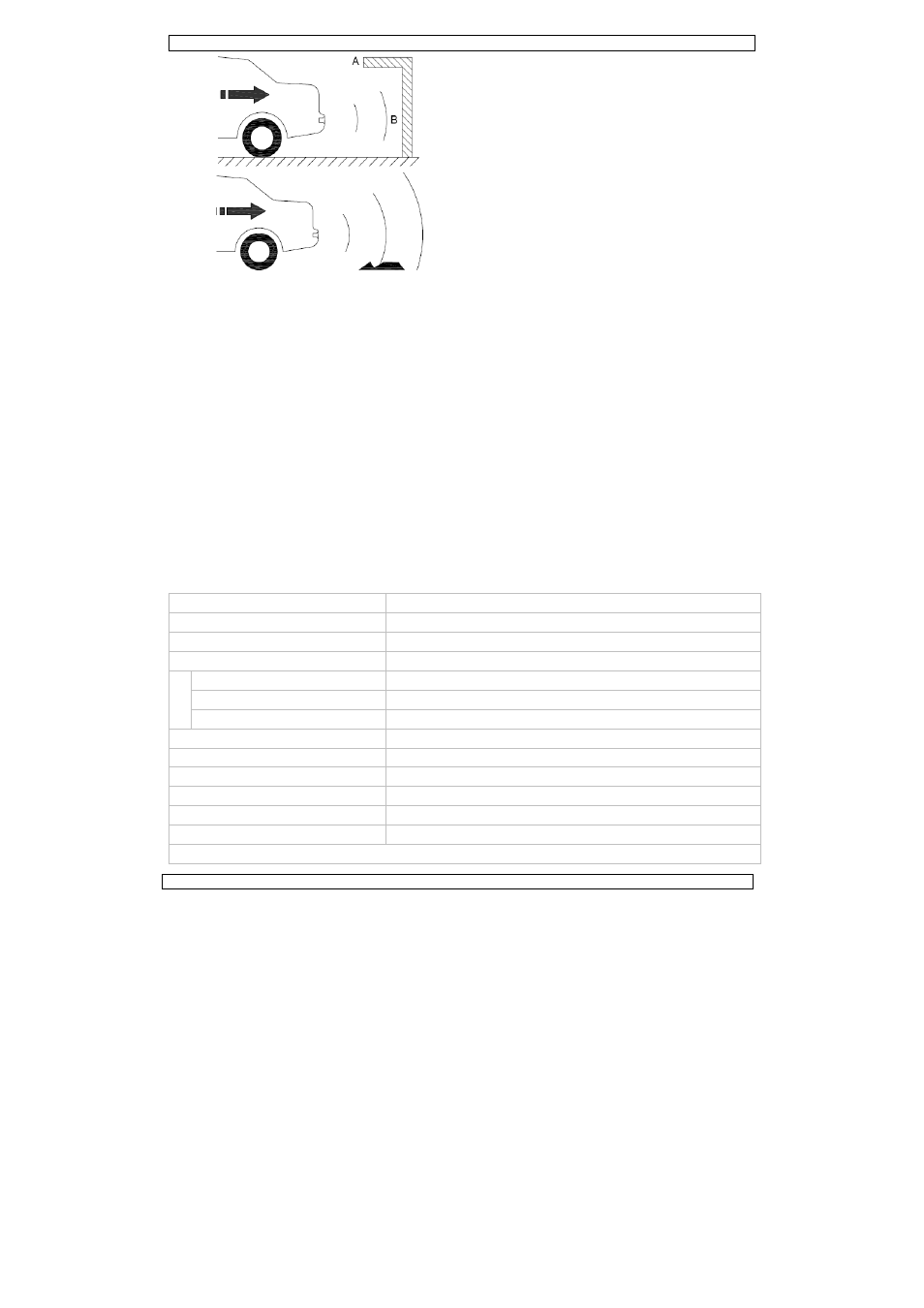
Shape
Surface B will be detected, but as surface A is
located outside the detection range, it may
never be detected.
Road conditions
Rough road conditions might trigger the
warning system.
• Keep sensors clean at all times to ensure proper functioning.
• Verify on a regular basis that sensors are still properly mounted.
• Defective sensors should be replaced as soon as possible. Refer to an authorized dealer for
spar parts.
• It is strongly advised to test the system before use.
8. Final Tests
Detection Test
Place an obstacle of ± 1m high at 80 to 100cm behind the rear bumper of your vehicle. Turn the
ignition to ON and put the car in reverse. The system should start to beep automatically or display
the distance to and the direction of the obstacle. Test the installed sensors individually.
Warning Test
Place an obstacle of ±50 x 50cm at 80 to 100cm behind the rear bumper of your car. Turn the
ignition to ON and put the car in reverse. The system should start to beep automatically or display
the distance to and the direction of the obstacle. Vary the distance of the obstacle to the vehicle
by moving it forwards and backwards. The system should now beep at different intervals and
meanwhile display the distance to and the direction of the obstacle. Move the obstacle left and
right: again, the system should beep automatically and display the distance to and the direction of
the obstacle.
9. Technical specifications
working voltage
10-16VDC (via reversing light)
rated voltage
12Vdc
rated current
120mA
Dimensions
LCD-housing
85 x 53mm
LCD
60 x 40mm
control unit
98 x 70 x 25m
warning modes
sound, distance+direction+bar graph on display
detection range
0.3 - 2m
max. alarm distance
2m
sensor angle
H 60°, V 60°
ultrasonic frequency
40KHz±1KHz
working temperature
-30°C to +70°C
for vehicle width up to 1.8m