Velleman SPBS10 User Manual
Page 7
28.09.200
Practica
• The
area
the d
user
sens
Ther
• Dete
9
al considerati
DO NOT rely
Be aware of
system.
The reverse
system incorpo
is minimal and
distance from a
must rememb
ors, the shape
refore it is advi
ection is not gu
ions
y solely on the
the surround
speed must b
orates highly s
d the SPBS10
a sensor to the
ber that the me
es and locations
sable to visual
uaranteed in ce
SPBS
7
e displayed in
dings of the v
be below 5km
sensitive ultras
has a long det
e surface of the
easured distanc
s of obstacles,
ly inspect the
ertain cases. A
10
nformation w
vehicle before
m/h when the
onic sensors a
tecting range.
e obstacle that
ce is influenced
the reflecting
situation behin
few examples
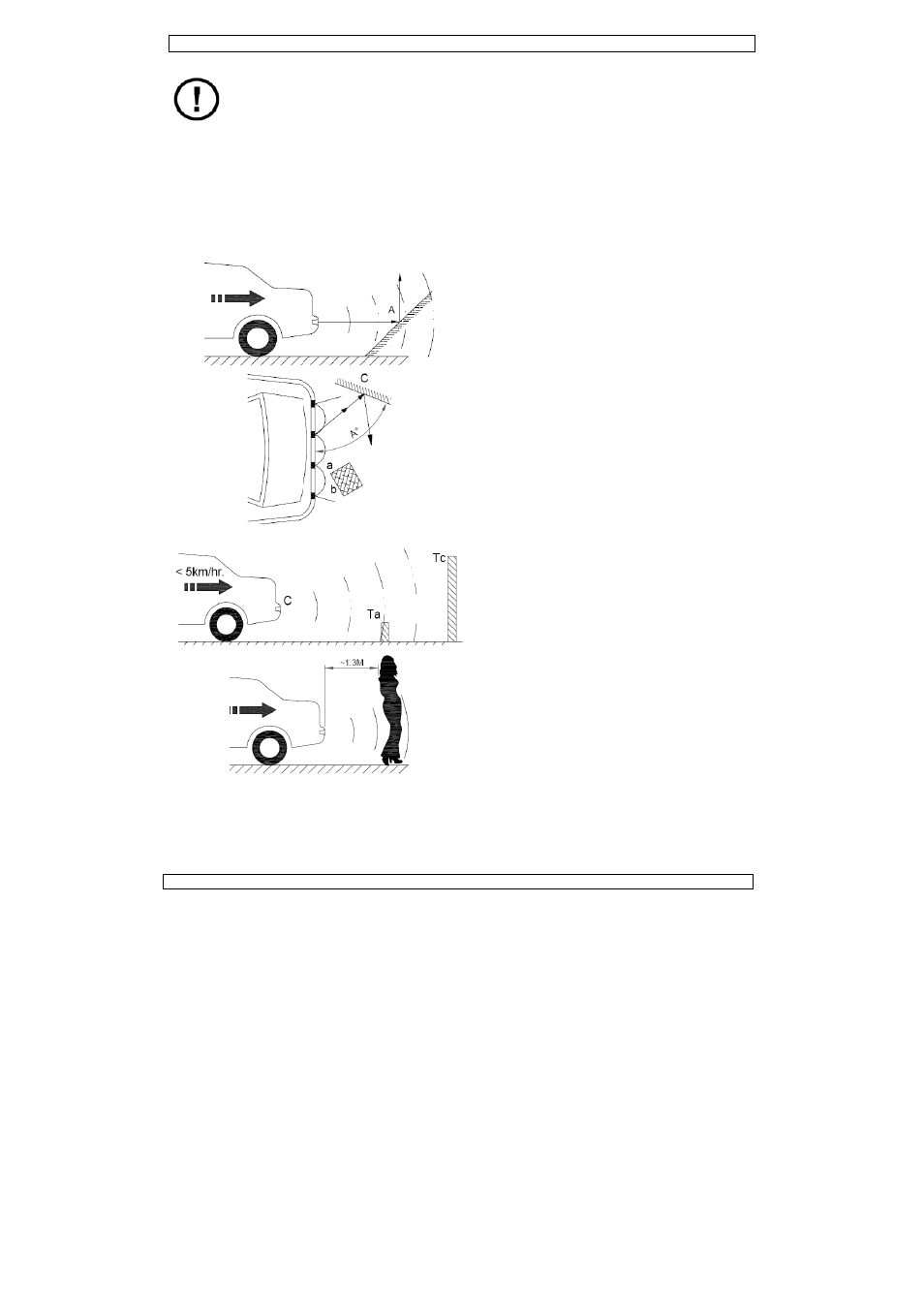
Reflection an
Depending on
may be distort
Point A in this
Reflection an
Surface a is cl
b, but surface
be detected fir
detected at all
Point C may n
is smooth and
Obstacle heig
At first, the ob
senor is detect
approaches th
stronger than
warns about T
Surface of ob
Obstacles that
waves e.g. spo
to detect. Due
may only be d
behind the veh
when driving t
e and during u
e parking aid
nd uses fuzzy
The detection
reflects the w
d by the positio
angle and othe
nd the vehicle
:
ngle
the reflection
ted.
example may
ngle
oser to the sen
b has a better
rst whereas su
.
ot be detected
shiny and ang
ght
bstacle Ta whic
ted. However,
e vehicle, its r
that of Ta, so
Tc.
bstacle
t strongly abso
onge or cotton
e to absorption
etected within
hicle.
©Vellema
he vehicle.
use of the
system is act
logic. The blind
result measur
aves. However
ons of the inst
er factors.
before reversin
angle, the read
not be detecte
nsor than surfa
r reflection so
rface a may no
when the surf
gle A° is large.
ch is below the
when Tc
eflection becom
the system on
rb ultrasonic s
fabrics are dif
of clothes, per
a range of ±1
an nv
tive.
d
es
r, the
alled
ng.
ding
ed.
ace
it will
ot be
face
e
mes
nly
ound
fficult
rsons
1.3m