Toshiba T300MVi User Manual
Page 54
41
Then, using Equation 2, we can determine that the bit within holding register #3
that coil #34 targets is (34-1)%16 = 1, as 33%16 = mod(3 r1) = 1. Therefore,
reading coil #34 will return the value of holding register #3, bit #1.
Note that this coil-to-register/bit relationship holds true regardless of whether or
not holding register #3 is assigned to a point. If holding register #3 is not
assigned to a point, then a Modbus exception will be returned. Either way, coil
#34 will always access holding register #3, bit #1.
15.1.2 Modbus RTU Slave
•
Broadcast (for functions 5, 6, 15 and 16) is supported.
•
Network characteristics selections
o Baud rate: 2400 / 4800 / 9600 / 19200 / 38400 bps
o Parity: odd / even / none (1 stop bit) / none (2 stop bits)
15.1.3 Modbus RTU Master
•
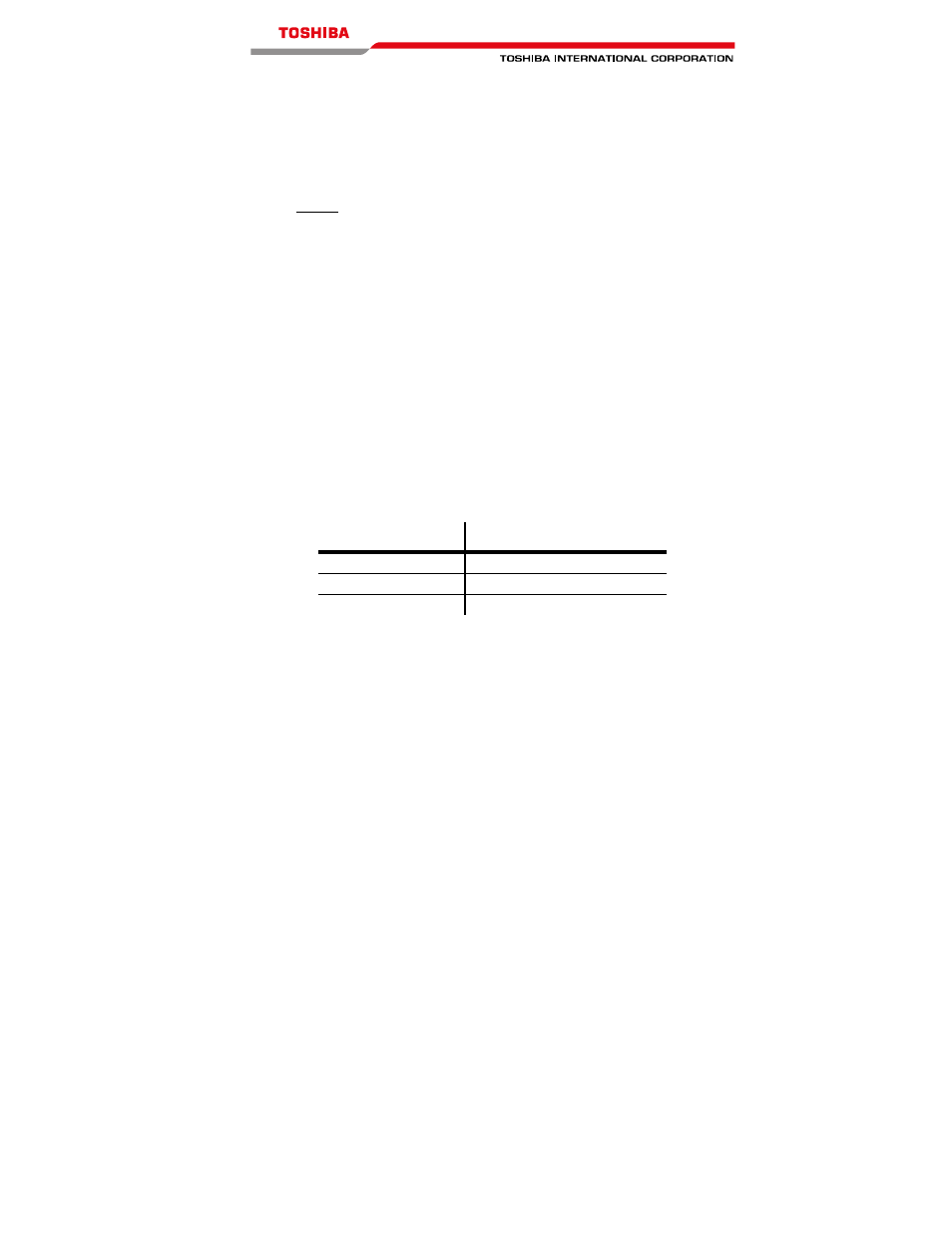
Supported Modbus master functions are indicated in Table 3. These
functions are automatically invoked by the interface in response to point
read or write requests.
Table 3: Supported Modbus Master Functions
Function Code
Function
3
Read multiple registers
4
Read input registers
16
Write multiple registers
•
The slave response timeout (in seconds) is assigned via the designated
port’s “Timeout” selection. If “0” is chosen (an invalid timeout time), the
interface will use a 2s timeout by default.
•
Network characteristics selections
o Baud rate: 2400 / 4800 / 9600 / 19200 / 38400 bps
o Parity: odd / even / none (1 stop bit) / none (2 stop bits)
•
The default register types that the Modbus master driver attempts to
access (read and write) are “holding” (4X) registers. However, “input” (3X)
registers will be accessed whenever a point’s assigned “register” index is in
the range of 30001..39999. Refer to Figure 29 for a graphical explanation
of which type of register is accessed (i.e. which function code is used)
based on the Modbus master “register” index assigned to a point. Simply
put, if the assigned “register” index is in the range of 30001..39999, a