Pioneer Module Mobile User Manual
Page 6
Overview
2
2.2 Basic Pioneer Platform
Pioneer 1 is a small, mobile robot developed by Kurt Konolige of SRI International
and Grinnell More of Real World Interface, Inc., and is available exclusively through
ActivMedia, Inc.
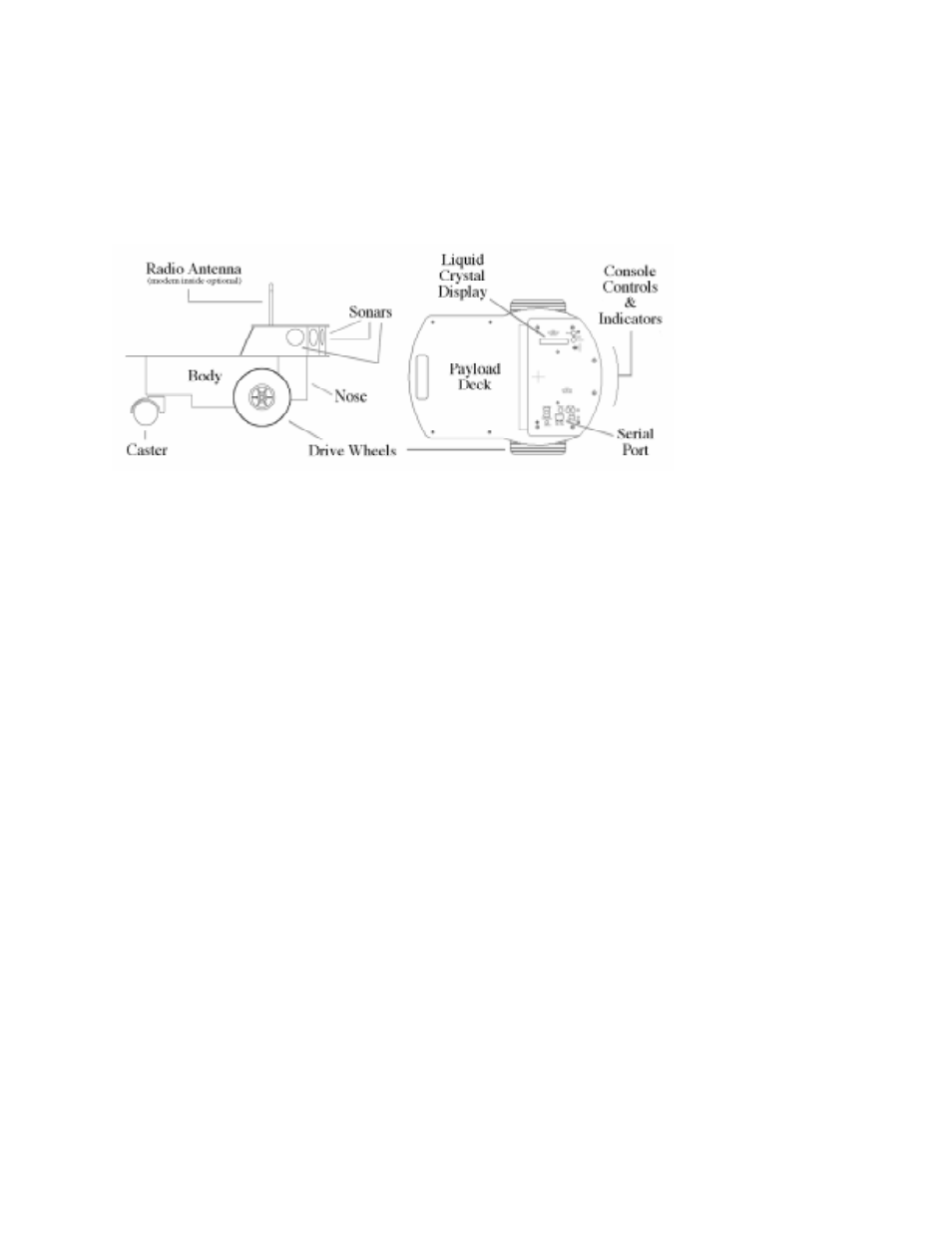
The basic Pioneer 1 Mobile platform contains all of the components for sensing and
navigation in a real-world environment, including battery power, drive motors and
wheels, position encoders, and ultrasonic sonar transducers—all managed via an
MC68HC11-based microcontroller board (Figure 1-1).
Figure 1-1. Basic components of the Pioneer 1.
The Pioneer 1 also comes with the Pioneer Server Operating System (PSOS) software
on EPROM for easy access and control of the robot’s systems, an RS232 serial port for
communication between the robot and other computers, as well as a variety of expansion
I/O ports for optional and custom attachments.
2.3 The Gripper & Experimenter’s Module
The Pioneer 1 Experimenter’s Module essentially is a circuit board and accessory
electronics that extend the capabilities of the Pioneer 1 microcontroller’s standard I/O
ports, including electrical support for the Pioneer Gripper. The Experimenter’s Module is
part of the Pioneer Gripper assembly, which together replace the nose the of basic robot
(see Figures 1-1 and 1-2 and Chapter 2, Installation).
2.3.1 Gripper Description
The Pioneer Gripper is a simple, yet powerful 2-DOF robotic manipulator and sensor
(Figure 1-2 and Figure 1-3). Driven by a single, reversible-DC servo-motor under control
of the Pioneer microcontroller, it operates between two states: down/open and up/closed.