Appendix b, Pioneer server information packet – Pioneer Module Mobile User Manual
Page 28
24
8.
Appendix B
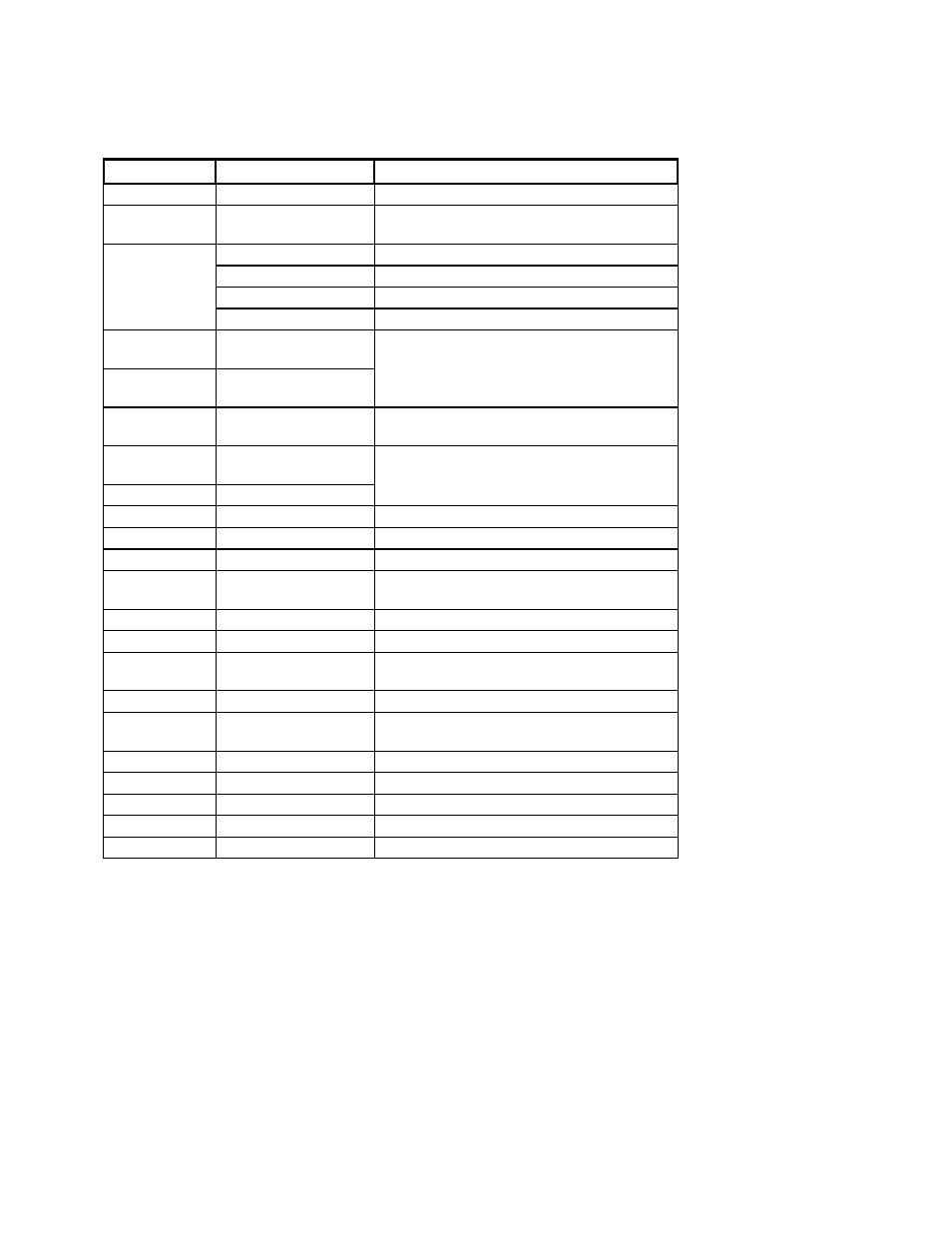
Pioneer Server Information Packet
Name
Data Type
Description
Header
int
Exactly 0xFA, 0xFB
Byte Count
byte
Number of data bytes + 2; must be less than 201
(0xC9)
Status
byte = 0x3S; where S =
Motors status
sfSTATUSNOPOWER
Motors power off
sfSTATUSSTOPPED
Motors stopped
sfSTATUSMOVING
Robot moving
Xpos
unsigned int (15 ls-bits)
Wheel-encoder integrated coordinates; platform-
dependent units—multiply by
Ypos
unsigned int (15 ls-bits)
DistConvFactor in the parameter file to convert to
mm; roll-over ~ 3 m
Th pos
signed int
Orientation in platform-dependent units—multiply
by AngleConvFactor for radians
L vel
signed int
Wheel velocities (respective Left and Right) in
platform-dependent units—
R vel
signed int
multiply by VelConvFactor to convert to mm/sec.
Battery
byte
Battery charge in tenths of volts
Bumpers
2 bytes - L and R
Motor stall indicators
Bumpers
unsigned int
Control
signed int
Setpoint of the server’s angular position servo—
multiply by AngleConvFactor for radians
PTU
unsigned int
Pulse width of position servo
Say
byte
verbal/sound clues
Sonar
readings
byte
Number of new sonar readings included in
information packet; readings follow:
Sonar num
byte
Sonar number
Sonar range
unsigned int
Sonar reading—multiply by RangeConvFactor for
mm
Input timer
unsigned int
User input timer reading
User Analog
byte
User analog input reading
User Input
byte
User digital input pins
User Output
byte
User digital output pins
Checksum
int
Checksum (see previous section)