LG C Series User Manual
Page 49
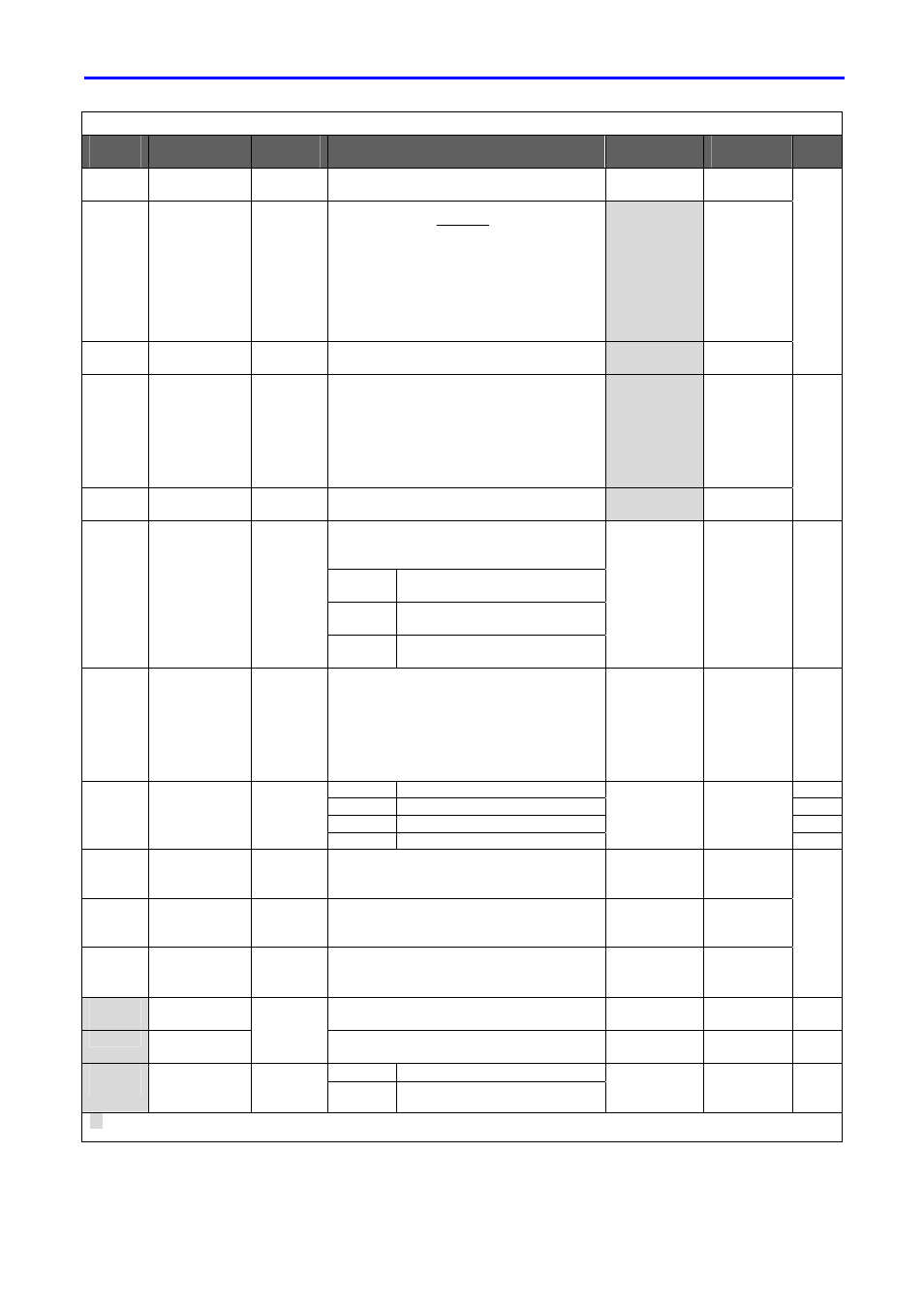
Chapter 7. Function list
Function group 2
LED
display
Parameter
Name
Min/Max
Range
Description
Factory
defaults
Adjustable
during run
Page
H31 [Number
of
motor poles]
2/12
This setting is displayed via rPM in
drive group.
- X
H32 [Rated
slip
frequency]
0/10
[Hz]
⎟
⎠
⎞
⎜
⎝
⎛
×
−
=
120
P
rpm
f
f
r
s
Where,
= Rated slip frequency
s
f
= Rated frequency
r
f
= Motor nameplate RPM
rpm
P
= Number of Motor poles
2)
Automatically
set
X
H33 [Motor
rated
current]
1.0/20
[A]
Enter motor rated current on the
nameplate.
- X
H34 [No
Load
Motor
Current]
0.1/12
[A]
Enter the current value detected
when the motor is rotating in rated rpm
after the load connected to the motor
shaft is removed.
Enter the 50% of the rated current
value when it is difficult to measure H34
- [No Load Motor Current].
- X
H36 [Motor
efficiency]
50/100
[%]
Enter the motor efficiency (see motor
nameplate).
- X
10-6
Select one of the following according
to motor inertia.
0
Less than 10 times that of
motor inertia
1
About 10 times that of motor
inertia
H37 [Load
inertia
rate]
0/2
2
More than 10 times that of
motor inertia
0 X
10-6
H39 [Carrier
frequency
select]
1/15
[kHz]
This parameter affects the audible
sound of the motor, noise emission from
the inverter, inverter temp, and leakage
current. If the value is set higher, the
inverter sound is quieter but the noise
from the inverter and leakage current will
become greater.
3 O
10-
16
0 {Volts/frequency
Control}
9-15
1
{Slip compensation control}
10-6
2
{PID Feedback control}
10-8
H40 [Control
mode select]
0/3
3
{Sensorless vector control}
0 X
10-11
H41 [Auto
tuning]
0/1
If this parameter is set to 1, it
automatically measures parameters of
the H42 and H43.
0 X
H42 [Stator
resistance
(Rs)]
0/5.0[
Ω]
This is the value of the motor stator
resistance.
- X
H44 [Leakage
inductance
(L
σ)]
0/300.0
[mH]
This is leakage inductance of the
stator and rotor of the motor.
- X
10-
10
H45
1)
Sensorless P
gain
P gain for Sensorless control
1000
O
H46 Sensorless
I
gain
0/32767
I gain for Sensorless control
100
O
0
Terminal I input (0 ~ 20 mA)
H50
[PID
Feedback
select]
0/1
1
Terminal V1 input (0 ~ 10 V)
0 X
10-8
1): Set H40 to 2 (PID control) or 3(Sensorless vector control) to display these parameters.
49