Miller Electric A.B.B. Robot Interface Gas Control Hub And Spindle User Manual
Page 17
OM-884 Page 13
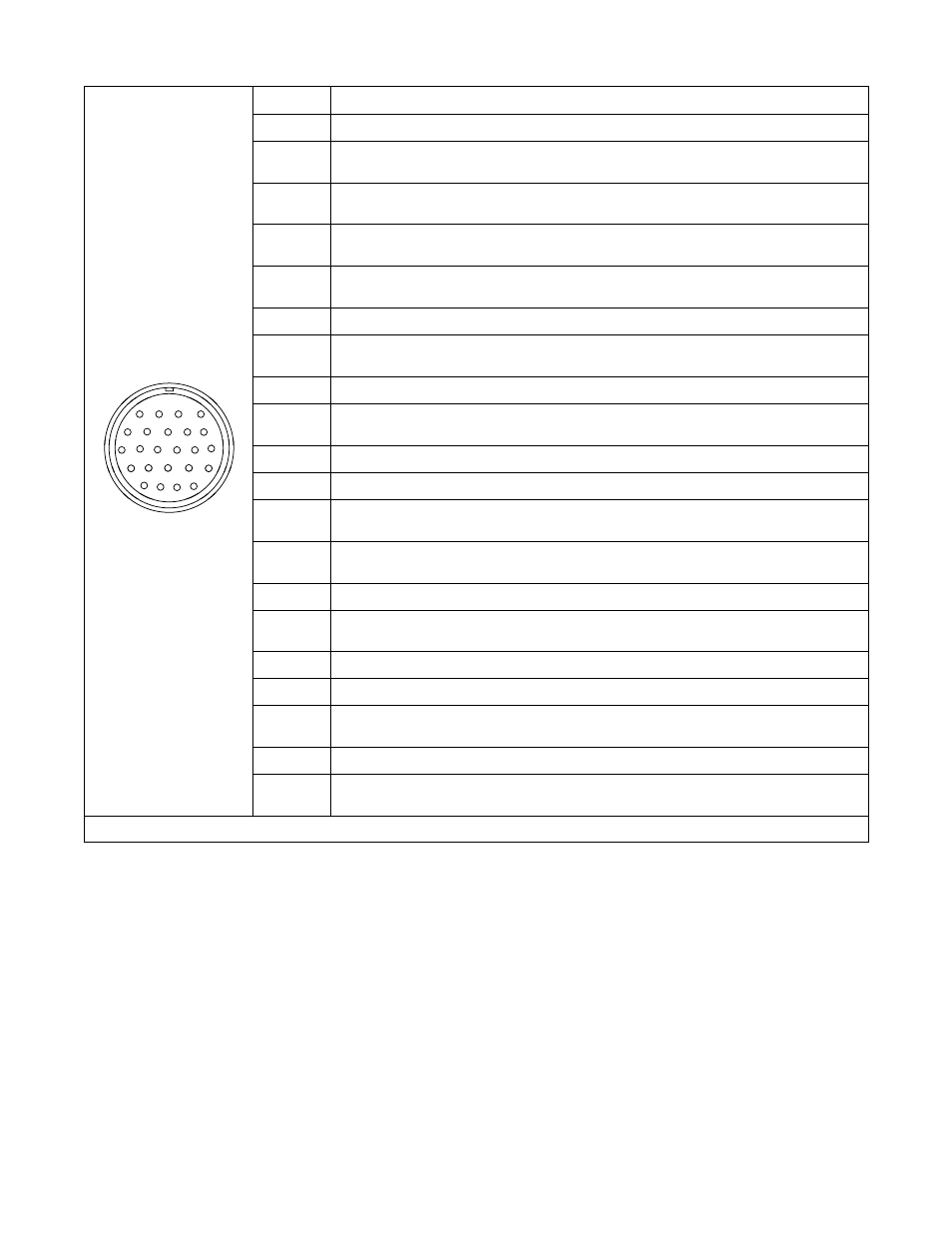
2-9.
24-Socket Receptacle RC17 Information
Socket*
Socket Information
A
Provides connection to 2TA; for customer use.
B
Current Detect output to robot control unit with respect to Socket D; isolated CR1 contacts rated
1A at 120 VAC.
D
Current Detect output to robot control unit with respect to Socket B; isolated CR1 contacts rated
1A at 120 VAC.
E
Contactor Control; +24 volts dc input from robot control unit with respect to Socket J (Circuit
Common).
F
Jog Forward; +24 volts dc input from robot control unit with respect to Socket J (Circuit
Common).
G
Gas Control; +24 volts dc input from robot control unit with respect to Socket J (Circuit Common).
H
Wire Stick Check; +24 volts dc input from robot control unit with respect to Socket J (Circuit Com-
mon).
J
Circuit Common for Sockets E, F, G, and H; all circuit voltages referenced to this point.
B
C
D
E
G
J
F
H
A
K
Jog Forward; momentary contact output to robot control unit with respect to Socket Q (Digital
Common).
M
N
L
R
S
K
P
T
Q
U
V
L
Set-Up and Weave Set-Up output to robot control unit with respect to Socket Q (Digital Common).
R
S
T
U
V
W
X
Y
Z
M
Weave Set-Up output to robot control unit with respect to Socket Q (Digital Common).
S-0291
N
Wire Stick Signal output to robot control unit with respect to Socket Q (Digital Common); indicates
wire is stuck to work; isolated CR2 contacts rated 1A at 120 VAC.
P
Weld Standby output to robot control unit with respect to Socket Q (Digital Common); indicates
robot interface is in standby; isolated CR5 contacts rated 3A at 120 VAC.
Q
Digital Common for Sockets K, L, M, N, and P.
R
+ Peak Amps; 0-10 volts dc input from robot control unit with respect to Socket S (analog
common) equals 0-500 amperes dc output.
S
Peak Amps; analog common for Socket R (+ Peak Amps).
W
Wire Feed Speed; analog common for Socket X (+ Wire Feed Speed).
X
+ Wire Feed Speed; 0-10 volts dc input from robot control unit with respect to Socket W (analog
common) equals 0-1000 IPM.
Y
Arc Volts; analog common for Socket Z (+ Arc Volts).
Z
+ Arc Volts; 0-10 volts dc input from robot control unit with respect to Socket Y (analog common)
equals 0-50 volts dc output.
*The remaining sockets are not used.